
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Mots-clés : Robot IML ; Fonctionnement du robot IML ; Robotique d’étiquetage dans le moule
Après avoir cliqué sur le bouton Zone, vous accédez à la page de configuration des axes où l'opérateur définit la zone de travail de l'axe du robot IML. Cette page comporte deux sous-pages : la première, « Configuration de la zone », permet de définir les paramètres de la zone de travail de l'axe du robot IML ; la seconde, « Correction de la zone », permet à l'opérateur de modifier les paramètres de cet axe.
Définition de la zone

| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection de points | Sélectionnez la valeur extrême de la zone que vous souhaitez définir. |
| (2) | mémoire de position actuelle | Cliquez pour mémoriser la position actuelle de l'axe sur la valeur de réglage (3). |
| (3) | Définir la valeur | Cliquez pour modifier le paramètre. |
| (4) | Position | La position actuelle de l'axe est affichée. |
Correction d'espace
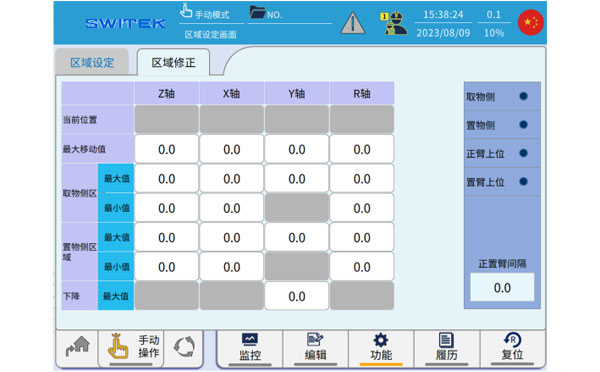
Les paramètres définis dans « Paramètres de zone » peuvent être consultés et modifiés dans « Correction de zone ».
Les paramètres de la zone définie doivent être cohérents avec le signal du capteur, etc., et le manipulateur sera alarmé s'il descend en dehors de la zone définie, ou s'il y a une tendance à sortir de la zone définie lorsque le bras est en position basse.
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





