
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Mots-clés : Robot IML ; Fonctionnement du robot IML ; Robotique d’étiquetage dans le moule
Le « Moniteur » dont il est question ici vous permettra de bien comprendre le fonctionnement du bras robotisé. Sur la page du moniteur, vous pouvez vérifier le signal du bras robotisé, de l'outil de préhension, de la presse à injecter, ainsi que l'état de fonctionnement du servomoteur et du système de commande du robot IML, afin de diagnostiquer rapidement la panne du système.
Cliquez sur l'icône  , la page suivante s'affiche : la page de surveillance :
, la page suivante s'affiche : la page de surveillance :

| Non | Nom | Fonction |
|---|---|---|
| (1) | Robot/Gabarit/IMM | IO affiche la catégorie ; cliquez pour accéder rapidement à la page du signal correspondant. |
| (2) | Page | Cliquez pour passer à la page E/S |
| (3) | Affichage E/S | Affichage en temps réel de l'état MARCHE/ARRÊT de tous les points d'entrée et de sortie actuels. |
| (4) | Surveillance de la conduite | Affichage en temps réel de la vitesse, du couple, du taux de charge et de l'écart de chaque servomoteur d'axe. |
| (5) | Surveillance interne | Affichage en temps réel de l'état des E/S internes. |
Utilisez (1) ou (2) pour basculer l'affichage IO, et le voyant avant est allumé pour indiquer que le signal est activé.
3.5.2 Surveillance du lecteur
Valeurs en temps réel
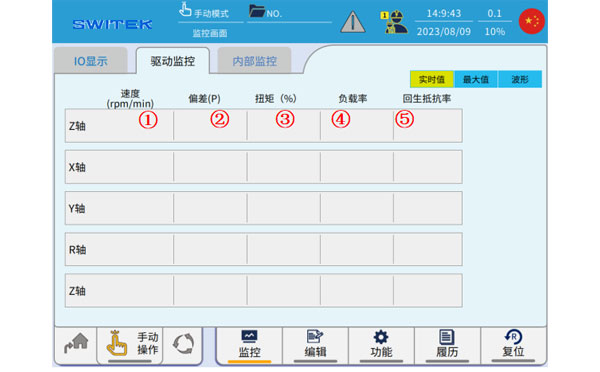
| Non | Nom | Fonction |
|---|---|---|
| (1) | Vitesse (tr/min) | Affichage en temps réel de la vitesse de rotation de chaque axe. |
| (2) | Écart (P) | Affichage en temps réel des écarts sur chaque axe. |
| (3) | Couple (%) | Affichage en temps réel du pourcentage de couple pour chaque axe. Le couple instantané du servomoteur peut atteindre jusqu'à 300 % du couple nominal. |
| (4) | facteur de charge | Affichage en temps réel du facteur de charge de fonctionnement de chaque axe. (100 % max.) |
| (5) | Resilience resistance rate | Real-time display of the load rate of respawn resistance. |
Maximum

| Non | Nom | Fonction |
|---|---|---|
| (1) | Vitesse maximale en marche avant | Enregistrement de la vitesse maximale de chaque axe lorsqu'il se déplace dans le sens positif. |
| (2) | Vitesse maximale négative | Enregistrement de la vitesse maximale de chaque axe se déplaçant dans une direction négative. |
| (3) | Écart maximal positif | Enregistre l'écart maximal de chaque axe dans la direction positive. |
| (4) | Écart maximal négatif | Enregistrement de l'écart maximal de chaque axe dans la direction négative. |
| (5) | Couple maximal en marche avant | Enregistrement du couple maximal de chaque axe lors de son déplacement dans le sens positif. |
| (6) | Couple maximal négatif | Enregistrement du couple maximal de chaque axe lorsqu'il se déplace dans le sens négatif. |
| (7) | Réinitialiser | La valeur maximale précédemment enregistrée est effacée. |
Forme d'onde
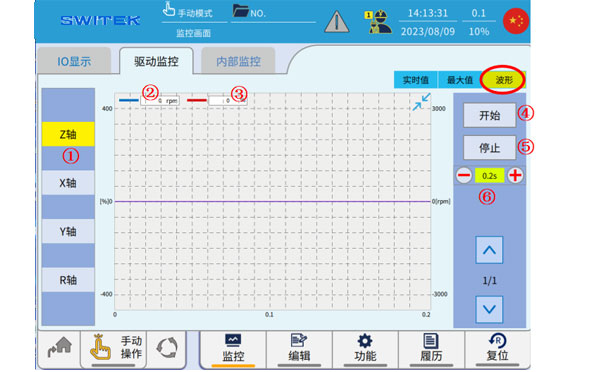
| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection de l'axe | Cliquez pour sélectionner l'axe à afficher. |
| (2) | Couple (%) | La courbe bleue représente la variation du couple. Le couple instantané du servomoteur peut atteindre jusqu'à 300 % du couple nominal. |
| (3) | Vitesse (tr/min) | La courbe rouge en forme d'onde indique la variation de vitesse. |
| (4) | Commencer | Après avoir sélectionné l'axe (1), cliquez sur « Démarrer » pour démarrer l'échantillonnage de la forme d'onde. |
| (5) | Arrêt | Arrêter l'échantillonnage de la forme d'onde |
| (6) | La forme d'onde affiche l'échelle. | Cliquez sur « + » et « - » pour zoomer et dézoomer sur la forme d'onde affichée. |
3.5.3 Moniteur interne
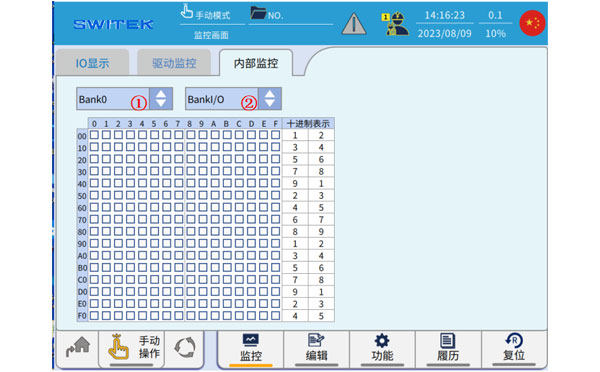
« La surveillance interne » fait référence à la surveillance de la position ON/OFF du drapeau interne du contrôleur, qui est divisée en 5 unités vides *2 , soit un total de 10 zones, et la commutation entre la banque et l'unité est effectuée par (1) et (2).
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





