
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Mots-clés : Robot IML ; Fonctionnement du robot IML ; Robotique d’étiquetage dans le moule
La section « Enseignement » vous permet de consulter et de modifier le programme du robot IML. Ce système de contrôle modulaire génère un programme initial pour votre projet IML après la sélection du mode, le paramétrage, le réglage du minuteur et du compteur. La page « Enseignement » vous permet d'effectuer quelques ajustements mineurs afin d'optimiser le fonctionnement du robot IML.
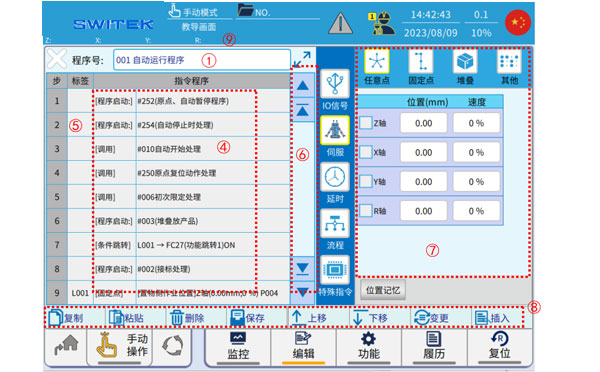
Description de chaque zone de marquage :
| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection/affichage du programme | Cliquez sur la fenêtre contextuelle « Liste des programmes », sélectionnez le numéro du programme que vous souhaitez ajouter, modifier ou consulter, puis cliquez pour accéder à l’interface d’édition. |
| (2) | Program extension display | Cliquez sur  , entrez dans l'interface étendue de l'affichage du programme pour une observation facile du contenu complet des commandes. , entrez dans l'interface étendue de l'affichage du programme pour une observation facile du contenu complet des commandes. |
| (3) | Retour | Cliquez pour quitter l'interface d'édition du tutoriel ; si le programme a été modifié, une compilation vous sera demandée. |
| (4) | Contenu pédagogique | Le contenu de la commande s'affiche. |
| (5) | Étiquette de colonne | Accédez à la zone d'édition de l'onglet. Cliquez pour ajouter une étiquette avant la ligne de commande (lors de la création d'une nouvelle étiquette, vous pouvez cliquer sur « EN » sans saisir un numéro, et un numéro d'étiquette inutilisé sera automatiquement ajouté). |
| (6) | Liste d'instructions de premier niveau |
|
| (7) | Liste secondaire des commandes et paramètres | Édition des commandes de sous-liste et paramétrage. |
| (8) | raccourcis d'édition de commandes |
|
| (9) | Affichage de la position de l'axe | La position actuelle de chaque axe est affichée pour une observation aisée. |
Vous trouverez ci-dessous des détails sur la manière d'« enseigner » un programme de robot IML :
Cliquez sur la zone d'affichage du nom du programme pour accéder à la liste des programmes.
L'interface est la suivante :
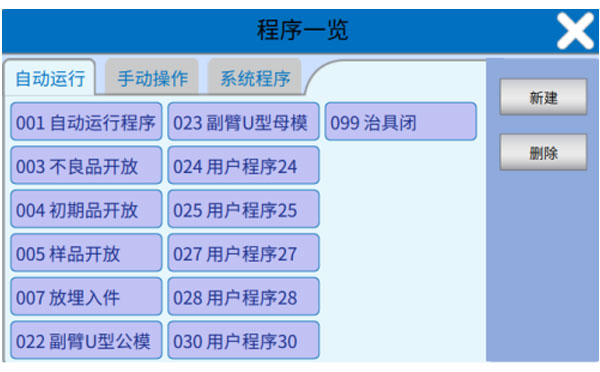
Autorun (001-099) : 001 est le programme principal qui peut être modifié par l'utilisateur, 024-083 sont des sous-programmes créés et modifiés par l'utilisateur.
Fonctionnement manuel (n° 178 à 249) :
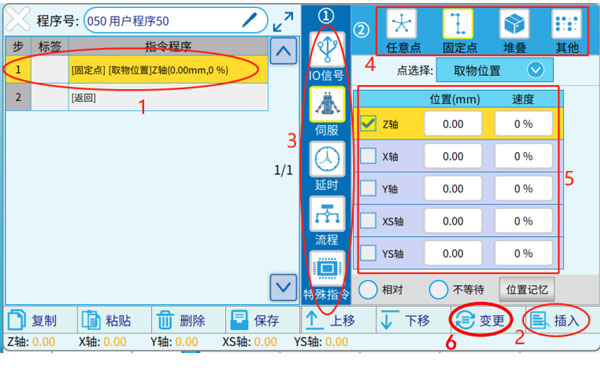
L'interface d'édition est telle qu'elle apparaît dans la figure ci-dessus, et la nouvelle ligne de commande est divisée en 6 étapes :
Voici quelques-unes des commandes les plus couramment utilisées :
Lors de l'enseignement de la programmation d'applications, il est déconseillé aux utilisateurs de modifier la logique de base des points X et Y pour la commande d'E/S standard de la machine de moulage par injection et du manipulateur (robot IML ici). Ils doivent appeler la sous-routine de fonction du système afin de garantir la précision du programme. Ces sous-routines se trouvent dans la classe « Signaux d'E/S ».
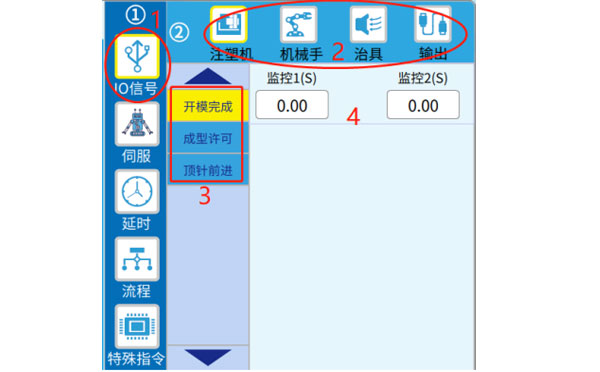
Comme indiqué dans la figure ci-dessus, les étapes de programmation sont définies étape par étape selon 1 (Catégorie principale), 2 (Sous-catégorie), 3 (Instructions spécifiques) et 4 (Paramètres spécifiques), puis, une fois terminé, cliquez sur « Modifier » ou « Insérer ».
Lors de la modification des fonctions pratiques liées au robot IML, vous pouvez utiliser les boutons de la figure suivante pour actionner les dispositifs associés au robot IML (vous pouvez observer l'activation/désactivation du signal de détection en activant ou désactivant le point à droite  ), ce qui facilite la programmation de simulations dans des scénarios d'utilisation réels.
), ce qui facilite la programmation de simulations dans des scénarios d'utilisation réels.

Pour modifier la logique de sortie du point d'E/S, l'interface d'édition est la suivante :
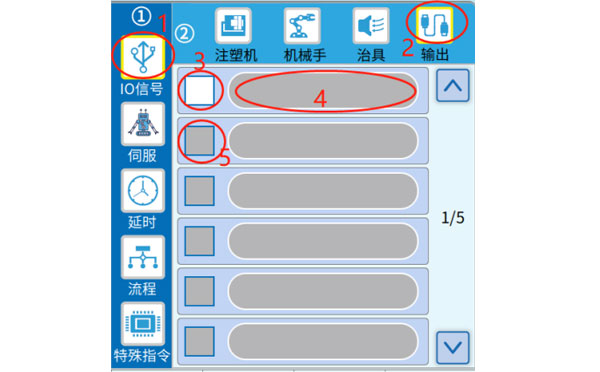
Dans l'interface d'édition de la figure ci-dessus, cliquez sur l'étiquette numéro 3 pour la modifier. La marque 4 devient alors modifiable. Sélectionnez l'option Activer ou désactiver l'affichage du point Y, puis confirmez. Si vous souhaitez afficher simultanément les points Y du robot IML, à l'emplacement 5, cliquez sur l'option pour commencer à modifier l'affichage du deuxième point Y. Une fois terminé, cliquez sur « Modifier » ou « Insérer ».
Modifiez les commandes de mouvement de l'axe du servomoteur, notamment le déplacement vers un point fixe (ce point est défini, peut être modifié dans le « Paramètres de position » et peut être référencé), vers n'importe quel point, vers un point empilé (la position est définie dans l'option « Empiler » du menu), et la commande de retour de l'axe à l'origine, etc. Prenons un point fixe comme exemple :
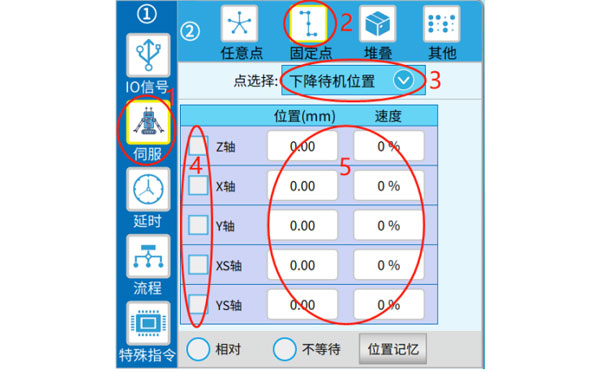
Comme indiqué dans la figure ci-dessus, sélectionnez le point précis à l'étiquette 3, puis sélectionnez l'axe de déplacement à l'étiquette 4, et définissez le point et la vitesse à l'étiquette 5. Une fois terminé, cliquez sur « Modifier » ou « Insérer ».
Il existe deux types de commandes de délai d'édition : la spécification de l'heure et la spécification du minuteur (la durée du minuteur peut être modifiée lorsqu'il s'exécute automatiquement).
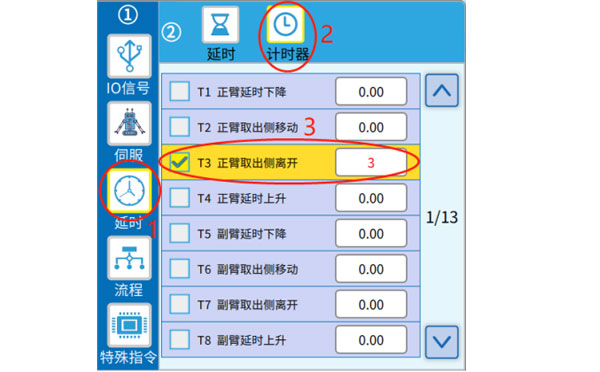
Remarque : Si vous souhaitez utiliser une minuterie lors de l’enseignement de la programmation, préférez les modèles T85 à T100, qui sont des minuteries utilisateur non spécifiquement définies.
L'invocation et le démarrage du programme sont deux manières d'utiliser des sous-programmes. La différence réside dans le fait que, lors de l'appel d'un sous-programme, celui-ci attend la fin de l'exécution de l'instruction qu'il contient (l'instruction « retour »), après quoi l'appel est considéré comme terminé et l'instruction suivante peut être exécutée dans le programme principal. En revanche, lors du démarrage, il n'est pas nécessaire d'attendre l'exécution du sous-programme ; l'exécution de l'étape suivante du programme principal peut alors commencer directement (le programme principal et le sous-programme sont exécutés en parallèle).
Voici les étapes à suivre pour modifier la commande de démarrage du programme :
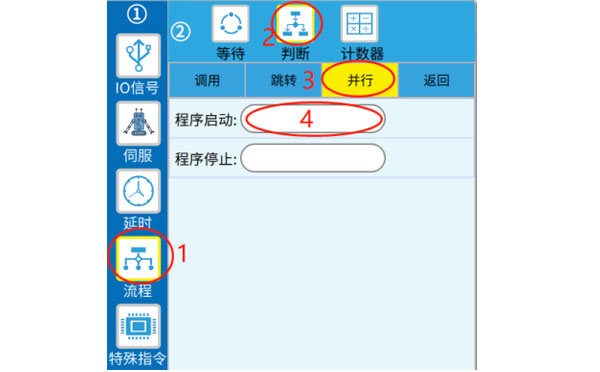
Remarque : Le programme lance le sous-programme ouvert, qui peut être fermé par « Arrêt du programme » ci-dessus (dans des circonstances normales, le sous-programme se ferme automatiquement une fois l’exécution terminée et l’instruction « retour » atteinte).
Voici les étapes pour modifier la commande d’appel :
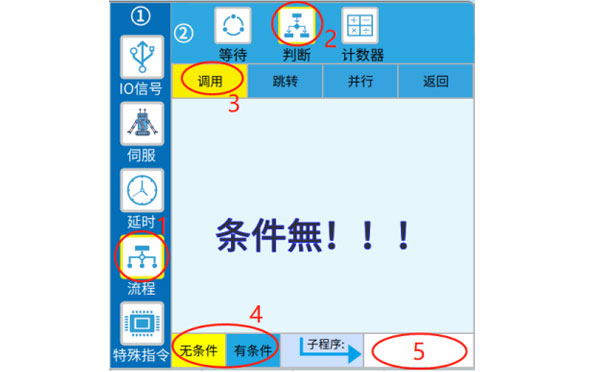
Comme indiqué par l'icône n° 4 ci-dessus, lors de la modification de l'instruction d'appel, vous pouvez choisir de définir ou non une condition. Sélectionnez « Inconditionnel », puis indiquez le numéro de sous-programme à appeler à l'emplacement 5 pour finaliser l'appel. Si vous sélectionnez « Conditionnel », vous devez d'abord définir la condition, puis indiquer le numéro de programme à l'emplacement 6 et cliquer sur « Modifier » ou « Insérer ».
Notez que si le jugement conditionnel précédent est faux, l'appel suivant ne sera pas exécuté, mais la ligne suivante d'instructions sera lancée.
Commande de saut : Le programme est exécuté jusqu’à la commande de saut, et l’étape suivante exécutera la ligne de commande avec l’étiquette correspondante, au lieu de l’exécuter dans l’ordre suivant.
Saut/saut conditionnel, les étapes de modification de la commande sont les suivantes :

Choisissez si vous souhaitez définir des conditions dans l'étiquette 4, définissez des conditions dans l'étiquette 5 (vous pouvez définir plusieurs conditions), définissez les numéros d'étiquette dans l'étiquette numéro 6, puis sélectionnez « Modifier » ou « Insérer » pour générer les commandes. Remplissez ensuite la colonne des étiquettes affichée dans l'étiquette numéro 7, avant la ligne de commande cible.
Si un saut conditionnel est utilisé, le jugement de condition précédent n'est pas valide et le saut suivant n'est pas exécuté. La ligne d'instructions suivante sera alors lancée directement. Si la condition est vraie, la ligne de commande effectuant le saut vers l'étiquette sera exécutée.
La sortie du drapeau interne est ON/OFF, et la procédure de modification est indiquée par le numéro d'icône ci-dessous.
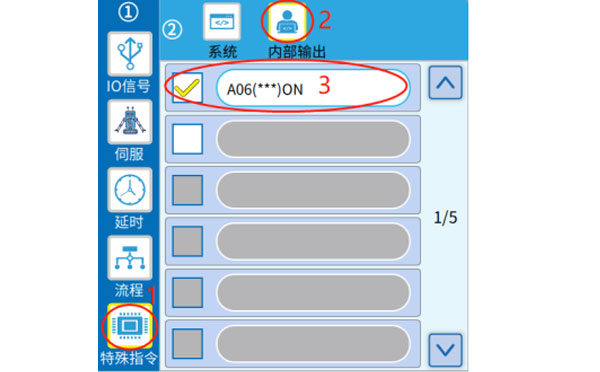
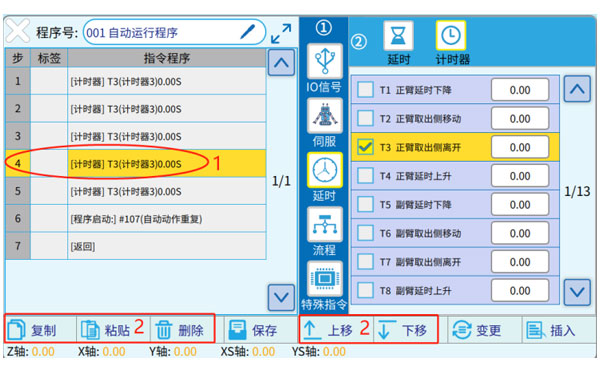
Comme indiqué dans l'icône numéro 1 ci-dessus, sélectionnez la ligne de commande que vous souhaitez modifier (elle devient jaune), puis utilisez le bouton portant l'étiquette 2 pour effectuer l'opération.
Les fonctions de chaque bouton sont les suivantes :
Une fois le programme modifié, vous pouvez cliquer sur « Enregistrer » ou sur «  » ou accéder à d'autres pages de paramètres pour déclencher l'invite « Compilation », cliquez sur « Oui » et attendez la fin de la modification (elle sera automatiquement enregistrée après la compilation).
» ou accéder à d'autres pages de paramètres pour déclencher l'invite « Compilation », cliquez sur « Oui » et attendez la fin de la modification (elle sera automatiquement enregistrée après la compilation).

Basculez le bouton situé dans le coin supérieur gauche de la console d'apprentissage sur AUTO pour accéder à l'interface de fonctionnement automatique. Accédez à l'apprentissage, comme indiqué ci-dessous, et cliquez sur l'icône « » affichée dans l'étiquette 1, pour accéder à l'écran d'affichage étendu. Cliquez sur l'étiquette 2 « Pas à pas » pour passer en mode pas à pas, puis appuyez une fois sur le bouton de l'étiquette 3, «  », et le programme s'exécutera à l'étape 1.
», et le programme s'exécutera à l'étape 1.
La progression du programme peut être consultée au numéro 4. « N° de programme » correspond au numéro du programme en cours d'exécution, et « N° d'étape » correspond au numéro de l'étape en cours d'exécution.

Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





