
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Mots-clés : Robot IML ; Fonctionnement du robot IML ; Robotique d’étiquetage dans le moule
Le paramétrage des éléments mécaniques du robot IML comprend la sélection de la modularité de l'unité fonctionnelle, les paramètres mécaniques de l'axe, du servomoteur, etc., afin de garantir un fonctionnement sûr et efficace du robot IML.
Sélection du modèle

| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection du modèle | Cliquez ici pour sélectionner le nom du mode applicable. |
| (2) | Sauvegarder | Après avoir sélectionné (1) le modèle, cliquez sur « Enregistrer » pour confirmer l’opération. |
| (3) | Les informations du modèle sélectionné sont affichées. | Cette section d'informations est affichée pour les modèles afin de vous aider à les distinguer. (Cette partie des informations du modèle doit être mise à jour pendant la production afin de garantir l'exactitude des données.) |
Veuillez noter que l'opération ci-dessus, la sélection du modèle et l'enregistrement, ne prend pas effet immédiatement après la finalisation du contenu du modèle. Il est nécessaire d'initialiser les paramètres mécaniques et les paramètres servo, puis de les enregistrer. Ensuite, le système redémarre pour que les modifications soient prises en compte.
Paramètres mécaniques

| Non. | Nom | Fonction |
|---|---|---|
| (1) | Initialiser | Cliquer dessus lira les données initiales des paramètres mécaniques dans le fichier du modèle et les renverra à l'affichage à (4). |
| (2) | Sauvegarder | Enregistrer les modifications existantes |
| (3) | Page | Les paramètres se font défiler vers le haut ou vers le bas. |
| (4) | Contenu des paramètres mécaniques |
|
Veuillez noter que la modification des paramètres ci-dessus ne prend pas effet immédiatement, mais doit être enregistrée, et ne prendra effet qu'après le redémarrage du système.
Paramètres de conduite

| Non. | Nom | Fonction |
|---|---|---|
| (1) | Initialiser | Cliquer dessus lira les données initiales des paramètres d'entraînement dans le fichier modèle et les renverra à l'affichage à (4). |
| (2) | Sauvegarder | Enregistrer les modifications existantes. |
| (3) | Page | Les paramètres se font défiler vers le haut ou vers le bas. |
| (4) | Contenu des paramètres du lecteur | Chaque paramètre du pilote est modifié et affiché. |
Instructions pour la configuration de certains paramètres du lecteur :
| Non. | Nom | Effet | Valeur initiale | Gamme | Unité | Le point principal du cadre | |
|---|---|---|---|---|---|---|---|
| PA1-02 | Sélection du système INC/ABS | Redémarrage | 0 | 0~1 | « 0 » désigne un moteur incrémental, « 1 » un moteur absolu | ||
| PA1-04 | Sens de rotation | Redémarrage | 0 | 0~1 | Ajustez lorsque le moteur tourne dans le mauvais sens. | ||
| PA1-13 | Mode de réglage | Temps réel | 0 | 0~2 | 0 correspond au mode automatique, 1 au mode semi-automatique et 2 au mode manuel. Le robot est configuré sur 1 lors de son expédition. | ||
| PA1-14 | Rapport charge/couple | Temps réel | 23.0 | 0.0~300 | Fois | ||
| PA1-15 | Gain d'accord | Temps réel | 7 | 1~40 | |||
| PA1-27 | valeur limite de couple avant | Temps réel | 300 | 0~500 | |||
| PA1-28 | valeur limite de couple négatif | Temps réel | 300 | 0~500 | |||
| PA1-52 | Réglage S acc/dcc | Temps réel | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Un nombre fixe de réponses aux commandes de position | Temps réel | 30.0 | 0.00~250.00 | |||
| PA1-55 | Position Anneau Gain 1 | Temps réel | 17 | 1~2000 | |||
| PA1-56 | Gain de l'anneau de vitesse 1 | Temps réel | 5 | 1~2000 | |||
| PA1-58 | Gain de rétroaction 1 | Temps réel | 0.000 | 0.000~1.500 | |||
| PA1-59 | Filtrage du couple | Redémarrage | 0.00 | 0.00~20.00 | |||
| PA1-70 | Mode filtre Notch | Temps réel | 1 | 0~1 | Lorsque la valeur est 0, la détection automatique 1 est valide pour la valeur définie. | ||
| PA1-71 | Numéro de fréquence Notch 1 | Temps réel | 134 | 10~4000 | |||
| PA1-72 | Atténuation Notch 1 | Temps réel | 1 | 0~40 | |||
| PA1-73 | Largeur de l'encoche 1 | Temps réel | 2 | 0~3 | |||
| PA1-74 | Numéro de fréquence Notch 2 | Temps réel | 53 | 10~4000 | |||
| PA1-75 | Atténuation Notch 2 | Temps réel | 1 | 0~40 | |||
| PA1-76 | Largeur de l'encoche 2 | Temps réel | 2 | 0~3 | |||
| PA1-78 | La fréquence numéro 0 de l'anti-résonance de freinage | Temps réel | 7.0 | 1~300.0 | Hz | L'amortissement des vibrations est efficace à l'arrêt, et il est nécessaire de mesurer les vibrations réelles avant le réglage. | |
| PA1-79 | rapport d'inertie des vibrations de freinage | Temps réel | 0 | 0~80 | Si sa valeur est fixée à 0, PA1-78 sera invalide, et si elle est fixée à 1, PA1-78 sera valide. | ||
| PA1-80 | La fréquence numéro 1 de l'anti-résonance de freinage | Temps réel | 8.0 | 1~300.0 | Hz | L'amortissement des vibrations est efficace à l'arrêt, et il est nécessaire de mesurer les vibrations réelles avant le réglage. | |
| PA1-81 | rapport d'inertie des vibrations de freinage | Temps réel | 0 | 0~80 | Si sa valeur est fixée à 0, PA1-80 est invalide, et si elle est fixée à 1, PA1-80 est valide. | ||
| PA1-94 | Mode filtre de couple | Redémarrage | 0 | 0~1 | Réglez la valeur à 0 et n'utilisez pas le filtrage du couple. | ||
| PA2-64 | Temps d'action du frein | Temps réel | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | sélection de résistance rétrograde | Redémarrage | 1 | 0~1 | Mettez la valeur à 1 lorsque la résistance de régénération est connectée, et à 0 lorsqu'elle ne l'est pas. | ||
| PA2-69 | Écart par rapport à la valeur détectée | Temps réel | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Réglage de la valeur d'impédance rétrograde | Temps réel | 30.0 | 3.9~160.0 | Ω | La valeur de la résistance régénérative est définie | |
| PA3-80 | Réglage de puissance d'impédance de réapparition | Temps réel | 40 | 1~5000 | W | Réglage rétroactif de la capacité de résistance | |
Easy set-up-tuning mode

| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection de l'axe | Cliquez pour sélectionner l'axe sur lequel vous souhaitez travailler. |
| (2) | Auto-tune | Lorsque la machine est réglée avant de quitter l'usine, les paramètres d'entraînement peuvent être déduits dans ce mode. |
| Réglage semi-automatique | Mode de réglage semi-automatique : certains paramètres sont fixes, d’autres seront ajustés avec précision. | |
| Réglage manuel | Tous les paramètres du variateur sont fixes. | |
| (3) | Définir la valeur | Le rapport gain/inertie/couple optimisé actuellement utilisé. |
| (4) | valeur calculée | La valeur issue du calcul actuel. |
| (5) |  | Appliquer le contenu de la valeur calculée à la valeur définie. |
| (6) |  | Appliquez le contenu de la « Valeur définie » à la « Valeur calculée ». |
| (7) | Sauvegarder | Modifier et enregistrer les paramètres actuels du pilote. |
En mode automatique, vous pouvez modifier le mode de réglage de chaque axe sur cette interface, changer le rapport couple-inertie et le gain de réglage, afin d'observer l'effet de fonctionnement des valeurs définies en temps réel et de trouver des paramètres plus adaptés.
En mode d'auto-réglage, le paramètre PA1-14 rapport couple d'inertie est mesuré en temps réel.
La fonction principale du mode de réglage automatique est d'ajuster automatiquement la valeur en fonction du comportement en marche lorsque les paramètres de conduite appropriés ne sont pas connus lors de la phase initiale de mise au point, jusqu'à ce que le comportement en marche soit bon et stable, et que la valeur du rapport couple d'inertie tende à se stabiliser.
Lorsque le fonctionnement est stable, passez en mode de réglage semi-automatique, paramétrez manuellement les réglages, enregistrez-les, coupez l'alimentation et redémarrez l'appareil pour que les modifications soient prises en compte. En mode de réglage semi-automatique, les principaux paramètres, tels que le « rapport de couple d'inertie », sont fixes, tandis que certains paramètres des servomoteurs sont ajustés en temps réel pour garantir un fonctionnement optimal.
En mode « Réglage manuel », tous les paramètres des servos sont fixes. Ce mode exige une grande précision dans le paramétrage.
Configuration facile - Réglage du filtre Notch

| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection de l'axe | Cliquez pour sélectionner l'axe sur lequel vous souhaitez travailler. |
| (2) | Filtrage adaptatif | Fonction de filtrage adaptatif avec commutation marche/arrêt. |
| (3) | Paramètres liés au filtrage Notch | Divers paramètres liés à la fonction de filtrage coupe-bande. |
Si un bruit aigu se fait entendre lors de la mise en marche ou pendant le fonctionnement du servomoteur, le filtre adaptatif peut être activé. Ce filtre éliminera automatiquement le bruit anormal causé par la résonance mécanique et pourra supprimer deux points de résonance. Lorsque la fréquence de résonance est réglée sur 4000 Hz, il n'y a aucun point de résonance.
Configuration facile - Réglage du contrôle des vibrations
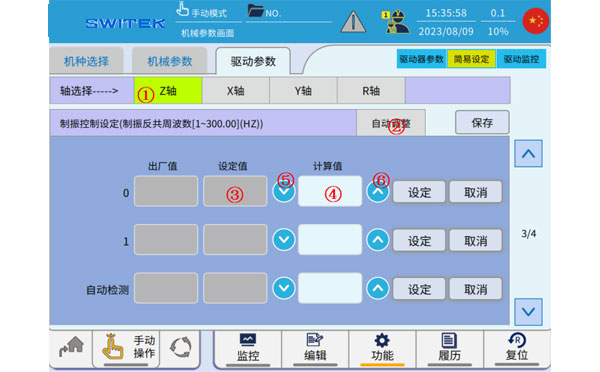
| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection de l'axe | Sélectionnez l'axe sur lequel vous souhaitez agir. |
| (2) | Réglage automatique | Les paramètres pertinents du système de contrôle des vibrations sont automatiquement détectés. |
| (3) | Définir la valeur | Paramètres de contrôle des vibrations actuellement utilisés. |
| (4) | valeur calculée | Calculer la valeur numérique obtenue. |
| (5) | | Appliquer le contenu de la valeur calculée à la valeur définie. |
| (6) | | Appliquez le contenu de la « Valeur définie » à la « Valeur calculée ». |
Réglage du contrôle des vibrations : Il permet de réduire les vibrations à l’arrêt, et la valeur de réglage habituelle se situe entre 5 et 10. Cette valeur peut être calculée rapidement à partir de la forme d’onde du couple, mais il est difficile de la régler correctement du premier coup.
Installation facile - Détection des collisions

| Non. | Nom | Fonction |
|---|---|---|
| (1) | Sélection de l'axe | La sélection de l'axe à définir |
| (2) | Variation du couple maximal |
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





