
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Keywords:Robot IML ; Fonctionnement du robot IML ; Robot d'étiquetage intégré
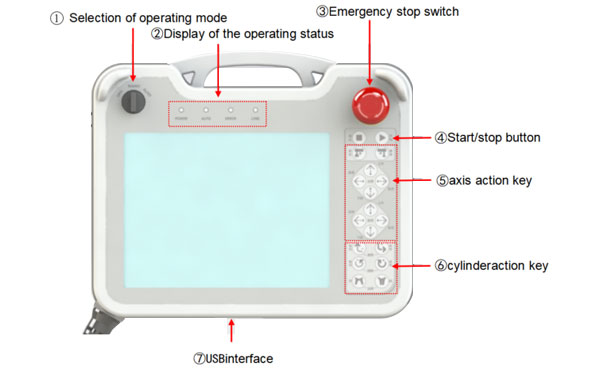
La console du robot IML offre une interface homme-machine (IHM) conviviale permettant aux opérateurs de démarrer, programmer ou diagnostiquer le système IML. Ce chapitre vous permettra de mieux comprendre le boîtier de commande du robot IML et la fonction de chaque composant de la console.
Face avant :
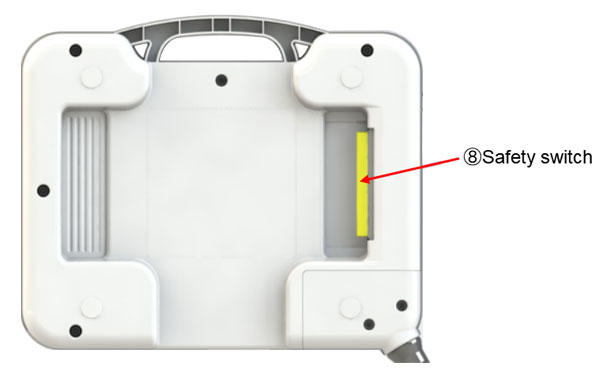
Verso :
| Non. | Nom | Fonctions |
|---|---|---|
| 1 | Sélection du mode de fonctionnement | Basculer entre le mode origine/manuel/automatique |
| 2 | Affichage de l'état de fonctionnement |
|
| 3 | Interrupteur d'arrêt d'urgence | Arrêt d'urgence du robot de retrait. Pour désactiver l'arrêt d'urgence, tournez la clé dans le sens horaire. |
| 4 | Bouton marche/arrêt | Démarrer/mettre en pause le fonctionnement automatique. |
| 5 | Touche d'action de l'axe | Grâce à l'interrupteur de sécurité, les cinq axes peuvent être déplacés dans les directions positive et négative. |
| 6 | Clé à cylindre | Le fonctionnement du vérin est contrôlé par l'interrupteur de sécurité. |
| 7 | Interface USB | Interface de communication pour le chargement et le téléchargement de données sur le pupitre d'enseignement. |
| 8 | Interrupteur de sécurité | En mode manuel, si cette touche est enfoncée, toutes les actions des touches d'action manuelle peuvent être exécutées. |
TSM-1000P:
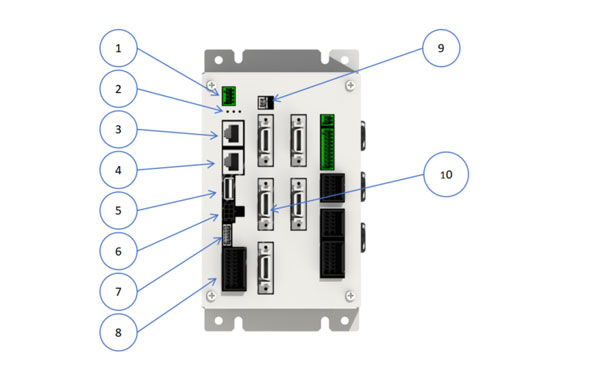
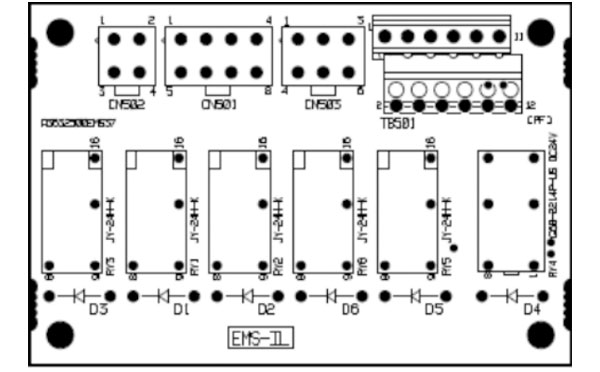
Description détaillée du câblage :
CN501:
| ÉPINGLE | Étiquette | Nom | Note |
|---|---|---|---|
| 1 | X00 | Signal de levage du bras M | Câblage vers TIO-A |
| 2 | X07 | Signal d'armement S | Câblage vers TIO-A (court-circuit en mode triaxial) |
| 3 | X18 | Zone de placement | Câblage vers TIO-A |
| 4 | 24G | 24G | Pas de câblage |
| 5 | 24G | 24G | |
| 6 | 24G | 24G | |
| 7 | 24G | 24G | |
| 8 | 24G | 24G |
CN502:
| ÉPINGLE | Étiquette | Nom | Note |
|---|---|---|---|
| 1 | RY2 | Sortie relais (non utilisée) | non utilisé |
| 2 | 24V | 24V | Branchez l'alimentation L+ |
| 3 | 24G | 24G | |
| 4 | 24G | 24G | Branchez l'alimentation L- |
CN503:
| ÉPINGLE | Étiquette | Nom | Note |
|---|---|---|---|
| 1 | MP_ON_1 | Servo activé | Connectez le port d'E/S du contrôleur (MOT) |
| 2 | EMS_1 | Sortie du signal EMS | |
| 3 | EMS_SW_1 | Entrée du signal EMS | |
| 4 | MP_ON_2 | servomoteur de contacteur activé | |
| 5 | EMS_2 | Sortie du signal EMS | |
| 6 | EMS_SW_2 | Entrée du signal EMS |
TB501:
| ÉPINGLE | Étiquette | Nom | Note |
|---|---|---|---|
| 1 | EMS OUT1 | Sortie EMS de la machine à emporter 1 | Raccordez le câble 23 (le câble relié à la machine de moulage par injection). |
| 2 | EMS OUT2 | Sortie EMS de la machine à emporter 2 | Raccordez le câble ligne 24 |
| 3 | Y35 | Activer la fermeture MLD | Connectez la broche 2 du connecteur CN302 du PIO. |
| 4 | Y35 | Activer la fermeture MLD | Connectez la broche 6 du connecteur CN302 du PIO. |
| 5 | Y35 | Activer la fermeture MLD | Raccordez le câble ligne 10 |
| 6 | Y35 | Activer la fermeture MLD | Raccordez le câble ligne 11 |
| 7 | EMSIN_1(24V) | Entrée de signal EMS externe 1 | Veuillez connecter les broches PIN7 et PIN8 lorsque vous n'utilisez pas le signal d'arrêt d'urgence externe. |
| 8 | EMSIN1_1 | Entrée de signal EMS externe 1 | |
| 9 | EMSIN1_2 | Entrée de signal EMS externe 2 | Veuillez connecter les broches PIN9 et PIN10 lorsque vous n'utilisez pas le signal d'arrêt d'urgence externe. |
| 10 | EMSIN1_2 | Entrée de signal EMS externe 2 | |
| 11 | EMSIN1_3 | Entrée de signal EMS externe 3 | Veuillez connecter les broches PIN11 et PIN12 lorsque vous n'utilisez pas le signal d'arrêt d'urgence externe. |
| 12 | EMSIN1_3 (24G) | Entrée de signal EMS externe 3 |
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





