
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Lorsque vous commandez un bras robotisé pour votre projet de moulage par injection, nous l'assemblons de manière à ce que les pièces soient déposées soit du côté opérateur, soit du côté opposé, selon votre projet. Cependant, il arrive parfois que vous deviez inverser le sens de dépôt des pièces sur la machine de moulage par injection. Dans ce cas, vous devrez inverser l'installation du bras robotisé. Ce chapitre utilise un robot d'injection servo à 3 axes, équipé d'un servomoteur et d'un contrôleur Panasonic, comme exemple pour illustrer comment procéder à une installation inversée du bras robotisé.
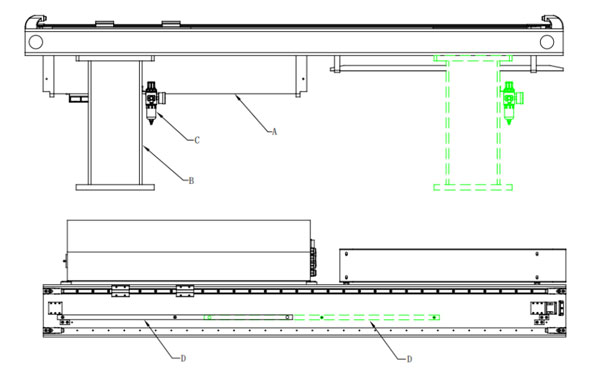
Base inversée
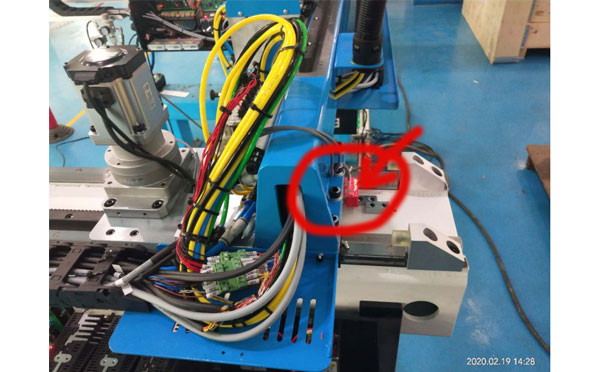
Capteur inverse 1
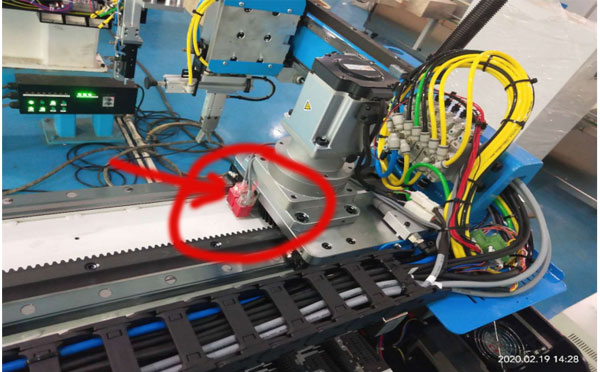
Capteur de marche arrière 2
Description

Réglage des paramètres du Panasonic A6
Le processus de modification :
Appuyez sur la touche « S » puis sur la touche « M » (une fois), recherchez Pr0.00, appuyez sur la touche « S » (une fois), si le paramètre affiché est « 1 », modifiez-le en « 0 » ; s'il est « 0 », modifiez-le en « 1 » (utilisez les touches haut/bas pour modifier les paramètres). Une fois tous les réglages effectués, appuyez sur la touche « S » pendant 2 secondes, puis sur la touche « M » (une fois), puis sur la touche « S » (une fois), puis sur la touche « HAUT » (maintenez la touche enfoncée pendant 7 secondes jusqu'à ce que l'écran affiche « ----- ») pour enregistrer les réglages.
Répétez la procédure ci-dessus pour définir les paramètres de Pr0.12, puis éteignez et redémarrez le robot une fois tous les paramètres configurés. Le robot sera alors redémarré avec les nouveaux paramètres.
AVERTISSEMENT : Pour la sécurité de vos installations, veuillez effectuer toute modification des paramètres en suivant les instructions de notre équipe d'assistance en ligne. Notre technicien vous guidera pas à pas tout au long du processus.
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





