
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Le fonctionnement des bras robotisés repose sur la coopération entre le système de commande et la structure mécanique. La carte électronique assure la communication entre le système de commande et la structure mécanique des bras robotisés. Dans ce chapitre, nous aborderons la définition des ports des cartes installées dans un bras robotisé.
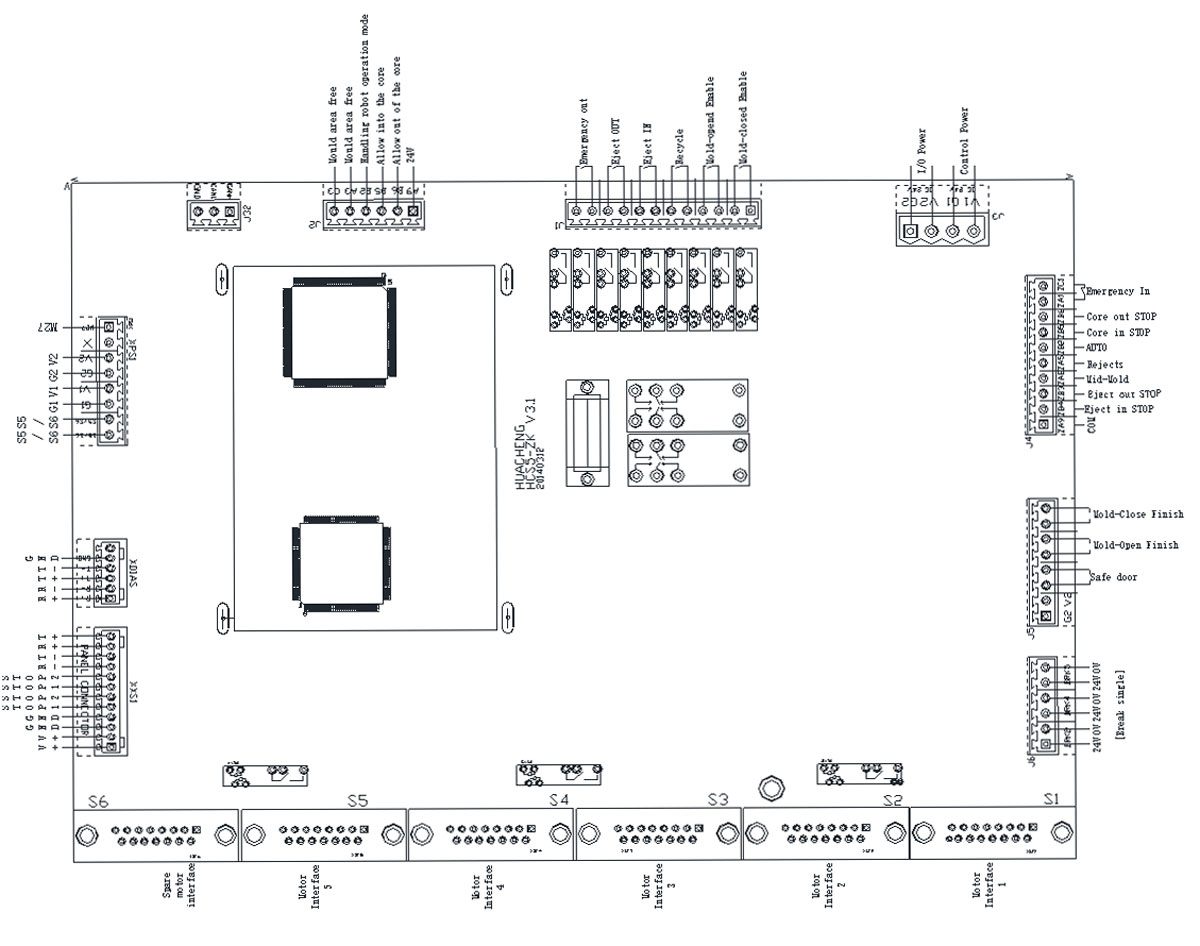
Le schéma ci-dessus représente la définition des ports de la carte mère des bras robotiques à injection servo SWITEK 5 axes.
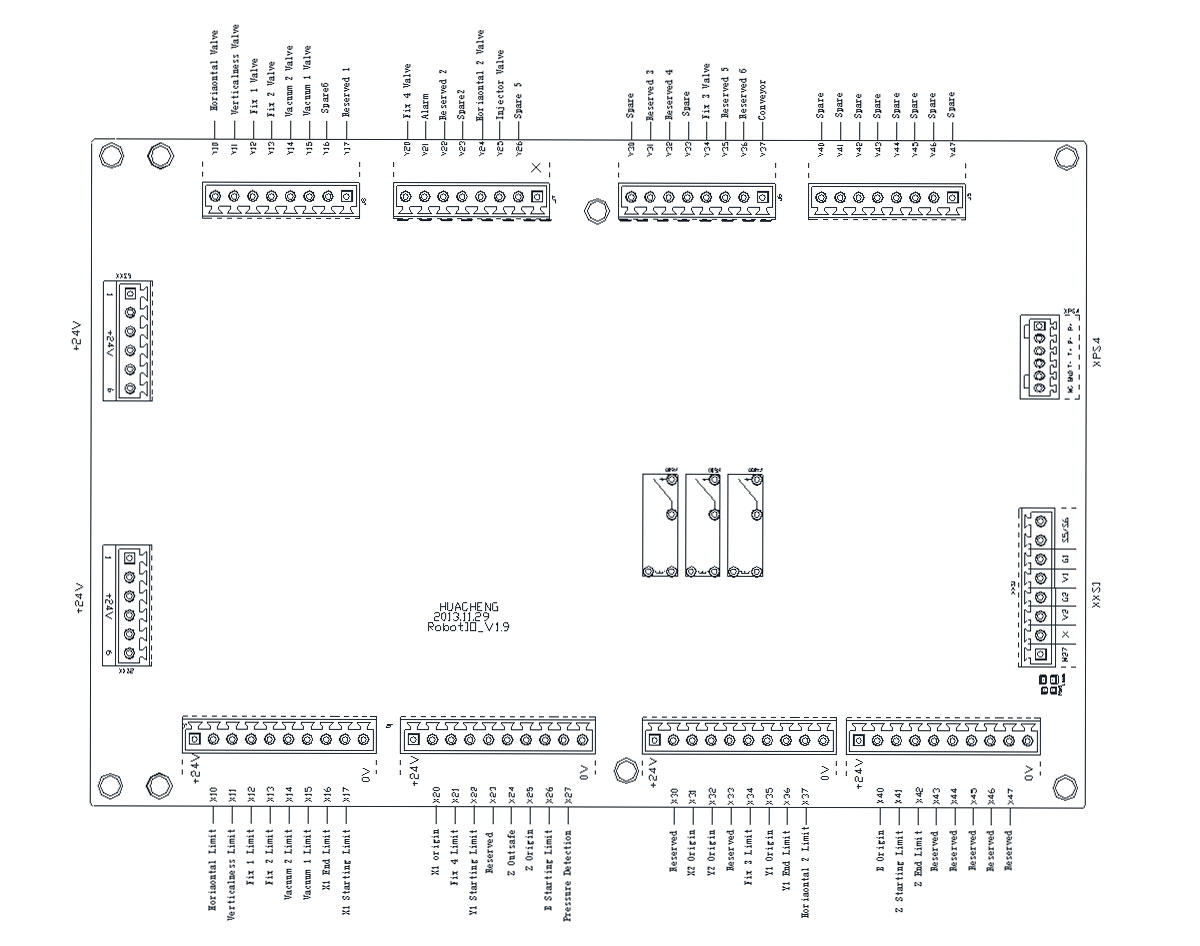
Le schéma ci-dessus représente la définition des ports de la carte d'E/S des bras robotiques à injection servo SWITEK 5 axes.
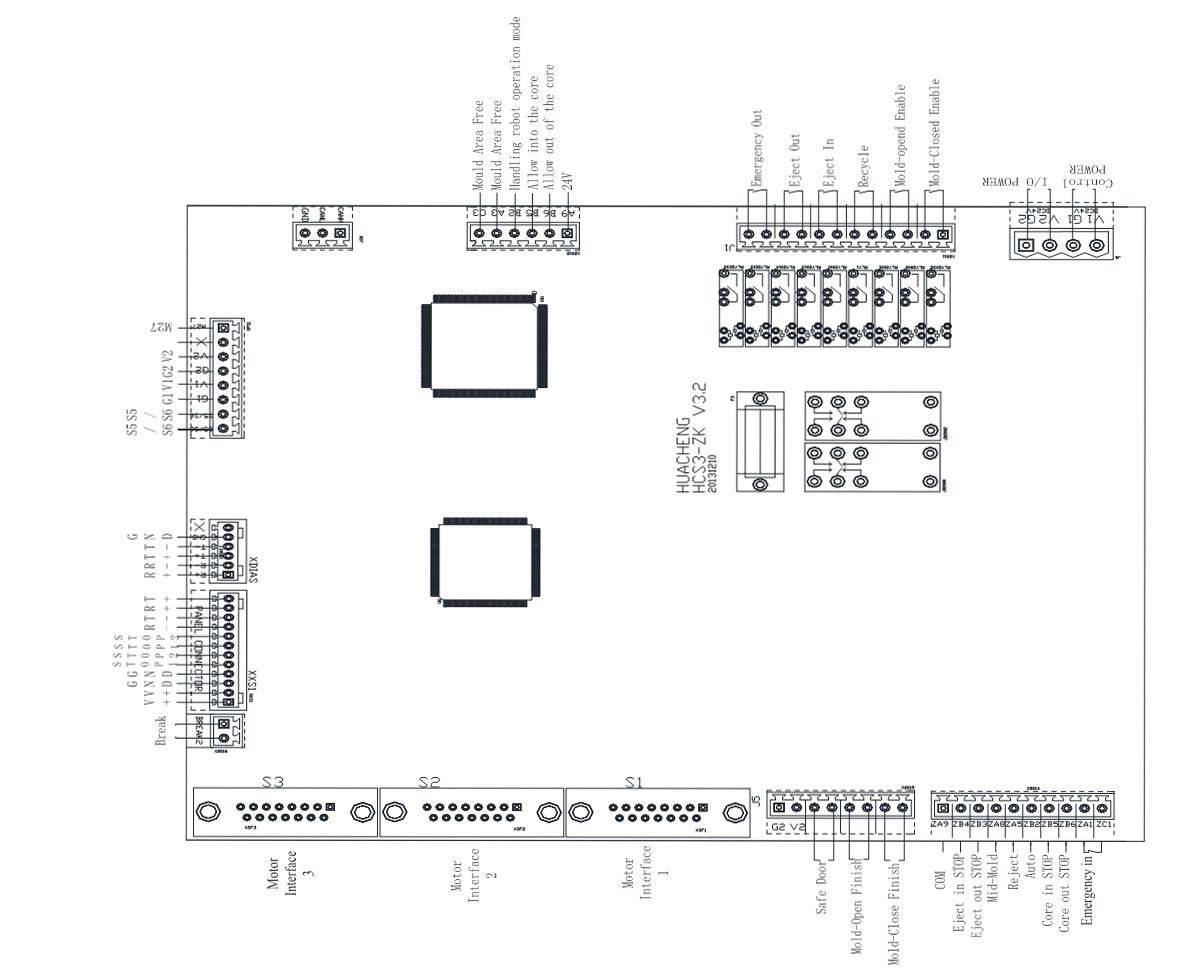
Le schéma ci-dessus représente la définition des ports de la carte principale des bras robotiques à injection servo SWITEK 3 axes.
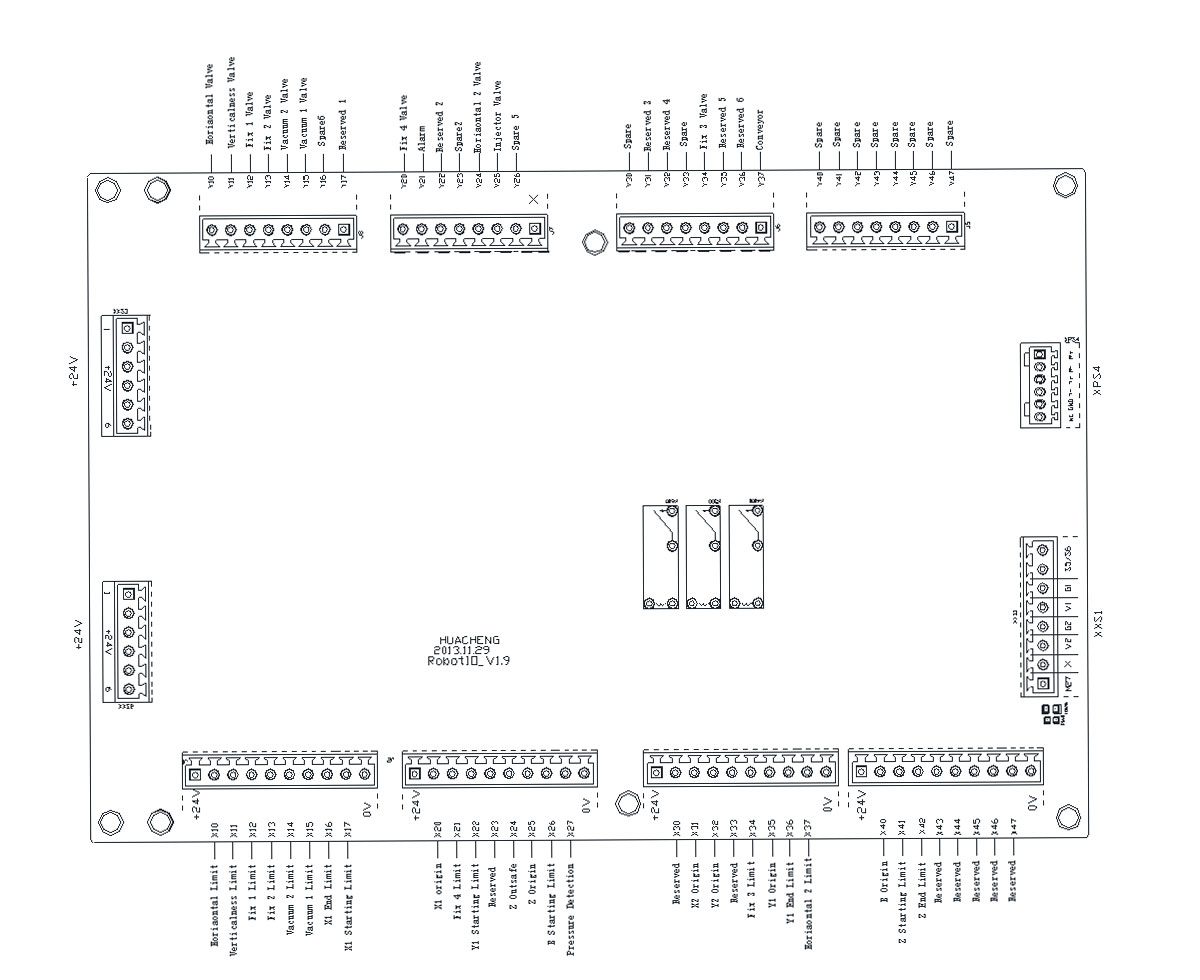
Le schéma ci-dessus représente la définition des ports de la carte d'E/S des bras robotiques à injection servo SWITEK 3 axes.
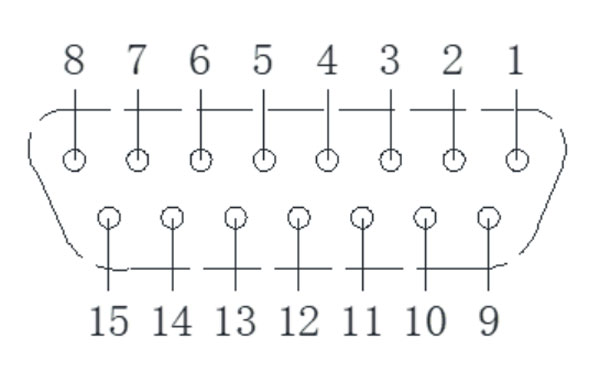
| N° de code PIN | Définition du terminal | N° de code PIN | Définition du terminal |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





