
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Le panneau de commande est l'interface permettant à l'opérateur de communiquer avec le bras robotisé. Il lui permet de démarrer, d'arrêter, de programmer et de régler la vitesse de chaque axe du bras robotisé. Ce chapitre présente brièvement le panneau de commande du contrôleur du bras robotisé (IHM).
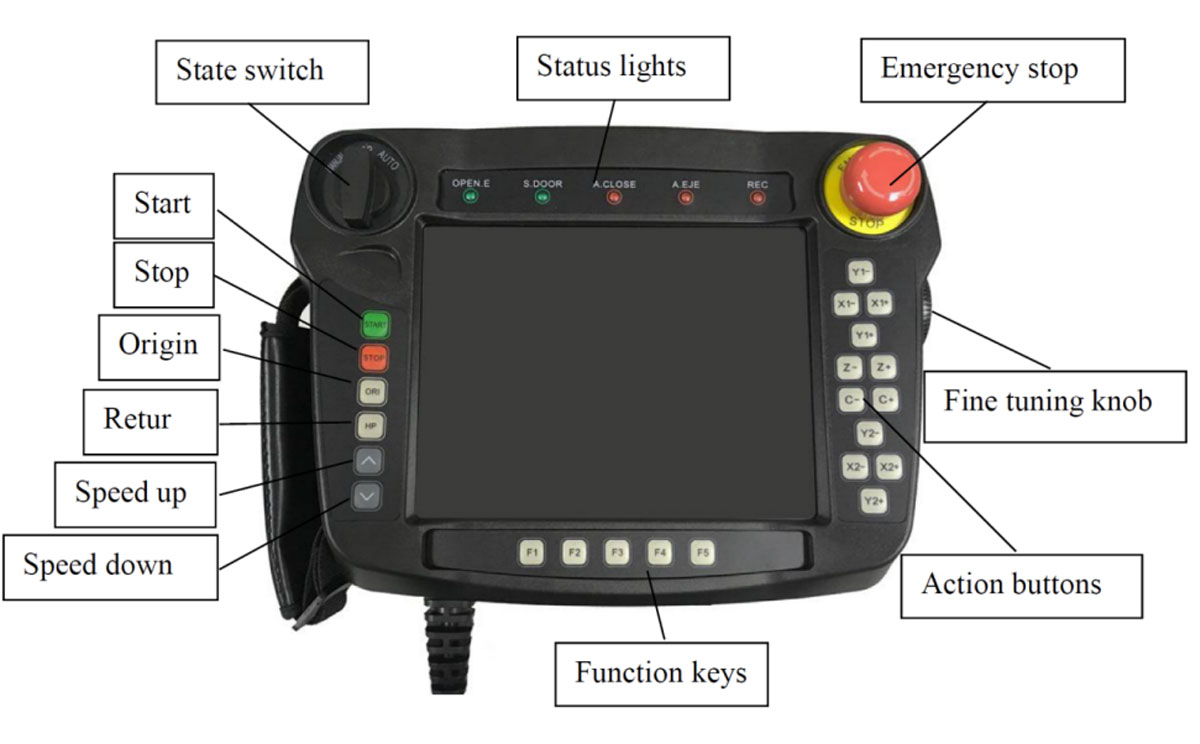
Arrêtez immédiatement le robot et les autres machines en cas d’urgence.
Effectuez un léger mouvement des coups pour un réglage précis de la distance.
Déplacer l'axe manuellement
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






