
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Mots-clés : SYSTÈME D'EMBALLAGE POUR BOÎTES DE PETRI, SOLUTIONS DE MOULAGE PAR INJECTION POUR BOÎTES DE PETRI
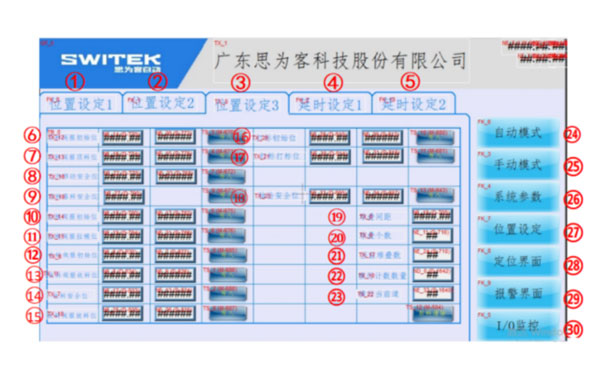
Les pages de réglage de position sont destinées à l'opérateur du système d'emballage de boîtes de Petri SWITEK. Elles indiquent d'où les bras robotisés doivent prélever les boîtes de Petri et où celles-ci doivent être placées, empilées ou emballées. Dans ce chapitre, nous aborderons le réglage de la position de l'axe du système d'emballage de boîtes de Petri à entrée latérale SWITEK.
Réglage de la position 1

| Non. | Description |
|---|---|
| 1 | Réglage de position 1 (Pos Set 1) 400 |
| 2 | Réglage de position 2 (Pos Set 2) 401 |
| 3 | Réglage de position 3 (Pos Set 3) 402 |
| 4 | Réglage du délai 1 (Réglage du délai 1) |
| 5 | Position de déverrouillage des pièces du bras principal (bras principal Rsl) 425 |
| 6 | Position de veille du bras principal (Main Arm Sby) 426 |
| 7 | Position de prélèvement des boîtes de Petri du bras principal (Collecte du bras principal) 427 |
| 8 | Position où le bras principal est autorisé à démarrer une pré-activation (bras principal avancé) 428 |
| 9 | Position d'exception du bras principal (Main Arm Exc) 429 |
| 10 | Position d'activation de la fermeture du moule (Fermeture du moule sécurisée) 430 |
| 11 | Position initiale de prélèvement en boîte de Petri (Mat Coll Init) 431 |
| 12 | Position de prélèvement en boîte de Petri (Mat Coll) 432 |
| 13 | Position finale de la cueillette en boîte de Petri (Mat Coll Cmp) 433 |
| 14 | Position de sécurité finale de la boîte de Petri (Mat Coll Safe) 434 |
| 15 | Position de prélèvement et de placement des boîtes de Petri (Mat Rel) 435 |
| 16 | |
| 17 | Position anormale de prélèvement/dépose dans la boîte de Petri (emplacement de l'anomalie) 582 |
| 18 | Position de sécurité basculante (Flip Safe) 437 |
| 19 | Position de transfert inversée (Flip Trans) 438 |
| 20 | Position de retournement et de placement de la boîte de Petri en toute sécurité (Flip Rel Safe) 439 |
| 21 | Position de démarrage sécurisée (Flip Safe Start) 440 |
| 22 | Position de retournement de la boîte de Petri (Flip Rel) 441 |
| 23 | Position finale de retournement de la boîte de Petri (Flip Cmpl) 442 |
| 24 | Retournement de la boîte de Petri Placement Fin Position de sécurité (Retournement Fin Sécurité) 443 |
| 25 | Mode automatique (Auto) |
| 26 | Mode manuel (Manuel) |
| 27 | Paramètres système (Sys Params) |
| 28 | Paramètres de position (Pos Set) |
| 29 | Interface de position (Pos Interface) |
| 30 | Interface d'alarme |
| 31 | Moniteur d'E/S (E/S Mon) |
Réglage de la position 2

| Non. | Description |
|---|---|
| 1 | Réglage de la position (Pos Set 1) 400 |
| 2 | Réglage de la position (Pos Set 2) 401 |
| 3 | Réglage de la position (Pos Set 3) 402 |
| 4 | Réglage du délai (Réglage du délai 1) 403 |
| 5 | Position initiale de retournement de la boîte de Petri (Flip Init) 405 |
| 6 | Retournement de la boîte de Petri sur place (retournement) 406 |
| 7 | Position initiale de la chute de la boîte de Petri (Init Blanking) 583 |
| 8 | Position de dépôt de la boîte de Petri (décharge à blanc) 584 |
| 9 | Position initiale d'empilement des boîtes de Petri (Stack Init) 407 |
| 10 | Position de dépôt des boîtes de Petri empilées (dépôt de la pile) 408 |
| 11 | Position d'arrêt du convoyeur d'empilage de boîtes de Petri (arrêt du convoyeur) 585 |
| 12 | Position initiale haut/bas (unité haut-bas) 409 |
| 13 | Position de veille haut/bas (Haut-Bas de) 410 |
| 14 | Position de collecte de la boîte de Petri verticale 411 |
| 15 | Position finale de collecte de la boîte de Petri (Up-Down Coll Cmpl) 412 |
| 16 | Position de veille de libération de la boîte de Petri haut-bas (Up-Down Rel Sby) 413 |
| 17 | Position de libération de la boîte de Petri haut-bas (Rel haut-bas) 414 |
| 18 | Position finale de libération de la boîte de Petri haut-bas (Up-Down Rel Cmpl) 415 |
| 19 | Position de collecte horizontale de la boîte de Petri (Horiz Coll1) 416 |
| 20 | Position de collecte horizontale de la boîte de Petri (Horiz Coll 2) 417 |
| 21 | Position de collecte horizontale de la boîte de Petri (Horiz Coll 3) 418 |
| 22 | Position de collecte horizontale de la boîte de Petri (Horiz Coll 4) 419 |
| 23 | Position de veille horizontale de la boîte de Petri (Horiz Standby) 586 |
| 24 | Position de libération horizontale de la boîte de Petri (Horiz Rel) 420 |
| 25 | Mode automatique (Auto) |
| 26 | Mode manuel (Manuel) |
| 27 | Paramètres système (Sys Params) |
| 28 | Réglage de la position (Pos Set) |
| 29 | Interface de position (Pos Interface) |
| 30 | Interface d'alarme |
| 31 | Moniteur d'E/S (E/S Mon) |
Réglage de la position 3
| Non. | Description |
|---|---|
| 1 | Réglage de position 1 (Pos Set 1) 400 |
| 2 | Réglage de position 2 (Pos Set 2) 401 |
| 3 | Réglage de position 3 (Pos Set 3) 402 |
| 4 | Réglage du délai (Réglage du délai 1) 403 |
| 5 | Réglage du délai (Réglage du délai 2) 404 |
| 6 | Position initiale du servomoteur d'ouverture de boîte de Petri (position initiale supérieure) 421 |
| 7 | Position de défécation du servomoteur de la boîte de Petri (position supérieure) 422 |
| 8 | Position de déplacement sécuritaire (Sécurité en mouvement) 587 |
| 9 | Position de sécurité pour la chute du couvercle de la boîte de Petri (Position de sécurité vide) 730 |
| 10 | Position initiale du servomoteur de tirage de manchon (initialisation du moule de tirage) 423 |
| 11 | Position de départ pour le tirage du manchon (moule à tirer) 424 |
| 12 | Position initiale de collecte de la boîte de Petri (Mat Coll Init) 479 |
| 13 | Point de retrait des boîtes de Petri (Station de retrait) 576 |
| 14 | Position de sécurité pour la collecte des boîtes de Petri (RecServo SP) 709 |
| 15 | Position de libération des pièces du servo pour la collecte des boîtes de Petri (Mat Coll Rel) 480 |
| 16 | Marquer la position initiale d'impression (Maring Init Pos) 731 |
| 17 | Position d'impression de la marque (Ajuster la marge) 732 |
| 18 | Position de sécurité d'échantillonnage (Contrôle ponctuel sécurisé) 746 |
| 19 | Espace d'empilage 481 |
| 20 | Nombre empilé (Num Stacks) 482 |
| 21 | Nombre d'éléments empilés actuellement : 694 |
| 22 | Nombre de comptage horizontal (Horiz Mat Ctr) 483 |
| 23 | Nombre de comptages de courant horizontal (comptage des comportements rampants) : 748 |
| 24 | Mode automatique (Auto) |
| 25 | Mode manuel (Manuel) |
| 26 | Paramètres système (Sys Params) |
| 27 | Paramètres de position (Pos Set) |
| 28 | Interface de position (Pos Interface) |
| 29 | Interface d'alarme |
| 30 | Moniteur d'E/S (E/S Mon) |
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





