
sales06@switek.com.cn

+86 135 3227 8260

Subscribe to Us
sales06@switek.com.cn
+86 135 3227 8260
Subscribe to Us
Mots-clés : SYSTÈME D'EMBALLAGE POUR BOÎTES DE PETRI, SOLUTIONS DE MOULAGE PAR INJECTION POUR BOÎTES DE PETRI
Le servomoteur du système d'emballage de boîtes de Petri à entrée latérale SWITEK contrôle le mouvement des axes pour réaliser les opérations suivantes : prélèvement, assemblage, tirage du manchon, scellage, etc., afin de finaliser le processus de production, du prélèvement des boîtes de Petri à leur emballage. Dans ce chapitre, vous comprendrez comment régler manuellement le servomoteur pour un fonctionnement optimal du système.
Réglage manuel du servo 1
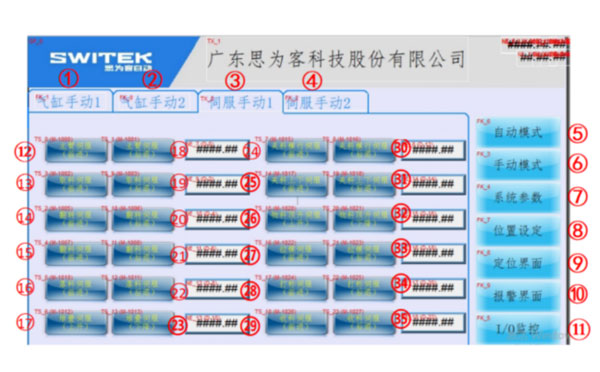
| Non. | Description |
|---|---|
| 1 | Réglage manuel du cylindre (Man Cyl) 1 |
| 2 | Réglage manuel du cylindre (Man Cyl) 2 |
| 3 | Réglage manuel du servo (Servo Man 1) |
| 4 | Réglage manuel du servo (Servo Man 2) |
| 5 | Mode automatique (Auto) |
| 6 | Mode manuel (Manuel) |
| 7 | Paramètres système (Sys Params) |
| 8 | Réglage de la position (Pos Set) |
| 9 | Interface de position (Pos Interface) |
| 10 | Interface d'alarme |
| 11 | Moniteur d'E/S |
| 12 | Servo du bras principal (avant) 141 |
| 13 | Servo de sélection de pièces (avant) (Mat Coll 1 [Adv]) |
| 14 | Servo de basculement (avant) (basculement [avancée]) 143 |
| 15 | Servo de retournement de pièces (avant) (Mat Flip [Adv]) 144 |
| 16 | Servo de largage de pièces (avant) (Tapis de largage [Av) 145 |
| 17 | Servo-empilement vers le haut (Empiler [vers le haut]) 146 |
| 18 | Servomoteur du bras principal (vers l'arrière) (Bras principal [Ret]) 147 |
| 19 | Servo de sélection de pièces (arrière) (Mat Coll1 [Ret]) 148 |
| 20 | Retournement du servo (vers l'arrière) (Retourner [Ret]) 149 |
| 21 | Servomoteur de retournement de boîte de Petri (retournement) (Mat Flip [Ret]) 150 |
| 22 | Servo de chute de boîte de Petri (vers l'arrière) (Tapis de chute [Ret]) 151 |
| 23 | Servo d'empilage de pièces (vers le bas) (Empiler [vers le bas]) 152 |
| 24 | Servomoteur de déplacement pour la découpe de boîtes de Petri (avant) (Clamp Tran [Adv]) 153 |
| 25 | Servomoteur vertical de fixation de boîte de Petri (montée/descente) (pince verticale [avancée]) 154 |
| 26 | Servomoteur de levage de boîte de Petri (levage du tapis [vers le haut]) 155 |
| 27 | Servo de traction de manchon (avant) (moule de traction [avancée]) 156 |
| 28 | Impression de marques (avant) Servo (Marquage [Av]) 157 |
| 29 | Servo de collecte de boîtes de Petri (avant) (Mat Coll2 [Adv]) 158 |
| 30 | Découpage de boîte de Petri par déplacement (arrière) Servo (Clamp Tran [Ret]) 159 |
| 31 | Servo-pincement vertical pour boîte de Petri (montée/descente) (pincement [retour]) 160 |
| 32 | Élévateur de boîte de Petri (vers le bas) Servomoteur (Élévateur de tapis [vers le bas]) 161 |
| 33 | Servo de retrait de manchon (Retrait) (Moule de retrait [Ret]) 162 |
| 34 | Impression de marques (Retrait) Servo (Marquage [Ret]) 163 |
| 35 | Servo de collecte de boîtes de Petri (retour) (Mat Coll [Ret]) 164 |
Réglage manuel du servo 2
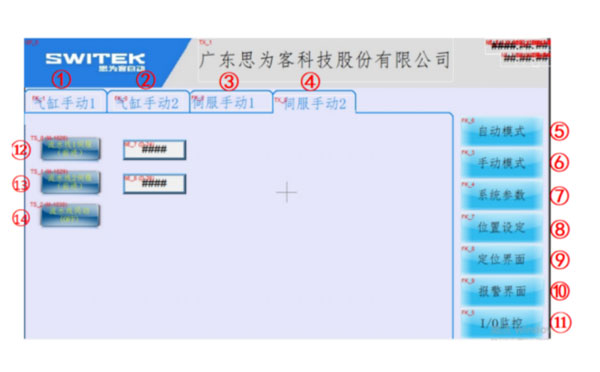
| Non. | Description |
|---|---|
| 1 | Cylindre manuel 1 (Man Cyl1) |
| 2 | Cylindre manuel 2 (Man Cyl2) |
| 3 | Servo manuel 1 (Servo Man 1) |
| 4 | Servo manuel 2 (Servo Man 2) |
| 5 | Mode automatique (Auto) |
| 6 | Mode manuel (Manuel) |
| 7 | Paramètres système (Sys Params) |
| 8 | Réglage de la position (Pos Set) |
| 9 | Interface de position (Pos Interface) |
| 10 | Interface d'alarme |
| 11 | Moniteur d'E/S (E/S Mon) |
| 12 | Servo-convoyeur 1 (Marche avant) (Conv 1 [Adv]) 165 |
| 13 | Servo-convoyeur 1 (retour) (Conv 1 [Ret]) 166 |
| 14 | Synchronisation du convoyeur (OFF) 658 (Synchronisation de ligne [OFF]) |
Email: sales06@switek.com.cn


Contactez SWITEK IML
sales06@switek.com.cn
+86 135 3227 8260

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





