
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

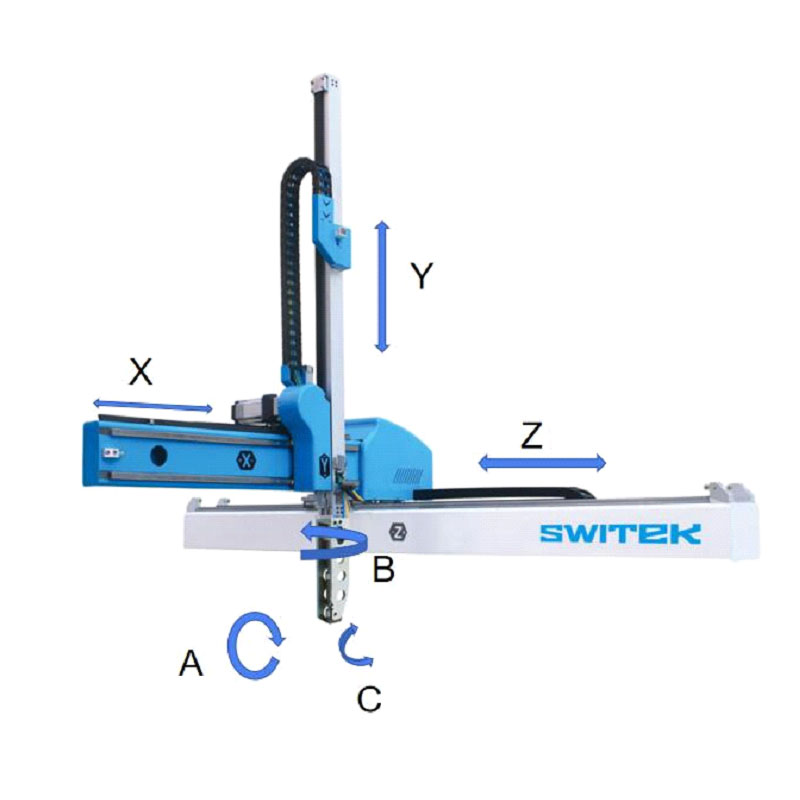
Définition de l'axe
Conseils : Pour sélectionner un robot d'injection adapté à votre projet d'injection de raccords de tuyauterie, outre la taille du robot, il est également très important de prendre en compte la charge utile du robot d'injection, en particulier le robot destiné à une application d'insertion dans le moule. Pour les raccords de tuyauterie en PVC/PPR avec inserts métalliques, le robot sélectionnera à la fois les pièces et l'insert et devra s'assurer que les inserts peuvent être insérés avec précision dans le moule, ce qui rendra le poids de l'EOAT bien plus élevé qu'un EOAT standard.
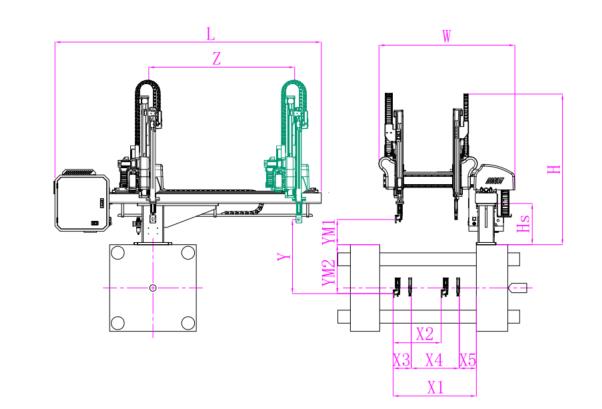
Robot Sizing
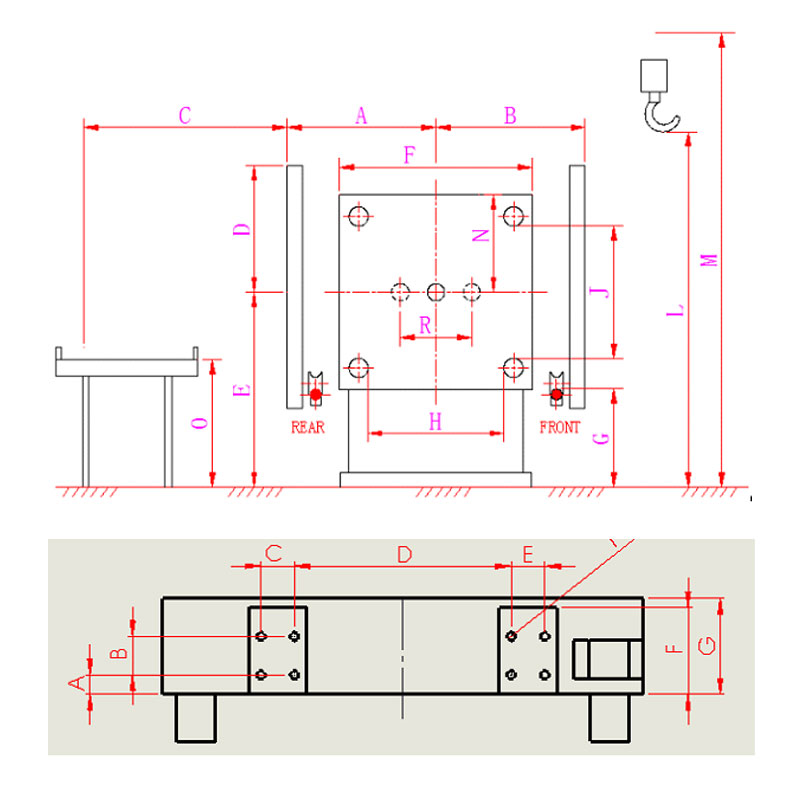
Installation du robot
Conseils : Le principe principal de la sélection d'un robot pour votre projet d'automatisation de l'injection est de s'assurer :
Pour tout système d'automatisation, il faut inclure un système d'automatisation pour les raccords de tuyauterie, il serait fabriqué sur mesure pour des produits spécifiques afin de garantir la productivité du système et de réduire les alarmes possibles du système. Ainsi, un système d'automatisation économique serait un système de production en masse de raccords de tuyauterie de taille unique du même matériau.
En ce qui concerne cette question, cela dépendra de la qualité requise après la découpe. En raison de la différence de caractère entre le PVC et le PPR, nous pouvons utiliser une feuille pneumatique pour retirer le canal d'un raccord de tuyau en PVC, mais pour les raccords de tuyau en PPR, il est préférable d'avoir un couteau de poinçonnage pour retirer le canal afin de garantir la qualité de la découpe du canal.
Pour un système d'automatisation de connecteurs de petite taille avec insertion dans le moule, 8 cavités seraient une conception de moule idéale compte tenu de l'investissement et de la complexité du système d'injection des raccords de tuyauterie. Avec un moule à 8 cavités, vous devrez investir dans une presse à injecter d'environ 200T et un robot d'injection avec une charge utile d'environ 15 kg, ce serait une option économique avec un système d'automatisation facile à entretenir.
Pour un système d'automatisation d'injection de raccords de tuyauterie, les informations dont nous avons besoin seraient :
PS : Si vous avez d'autres questions sur le démarrage d'un système d'automatisation d'injection de raccords de tuyauterie, n'hésitez pas à nous envoyer un e-mail ou à nous contacter par Wechat/Whatsapp pour une communication instantanée.
Contacter le blogueur
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China



