Instructions d'installation des bras robotisés SWITEK pour machines de moulage par injection - Chapitre 7 : Configuration des fonctions
Abstrait
La programmation d'un bras robotisé pour presse à injecter ne se limite pas au réglage de la position de l'axe, à l'activation/désactivation des vérins et autres pièces EOAT, etc. Elle inclut également les réglages des signaux permettant au robot de communiquer avec la presse à injecter, les réglages du produit, le réglage de la pile, la configuration de la machine, les réglages système, les réglages des points de sécurité, etc. Dans ce chapitre, nous expliquons étape par étape comment configurer ces paramètres des bras robotisés.
Dans l'état d'arrêt, cliquez sur l'élément de menu Fonction dans la barre de menu principale pour accéder à la page de configuration des fonctions. Comme illustré ci-dessous :
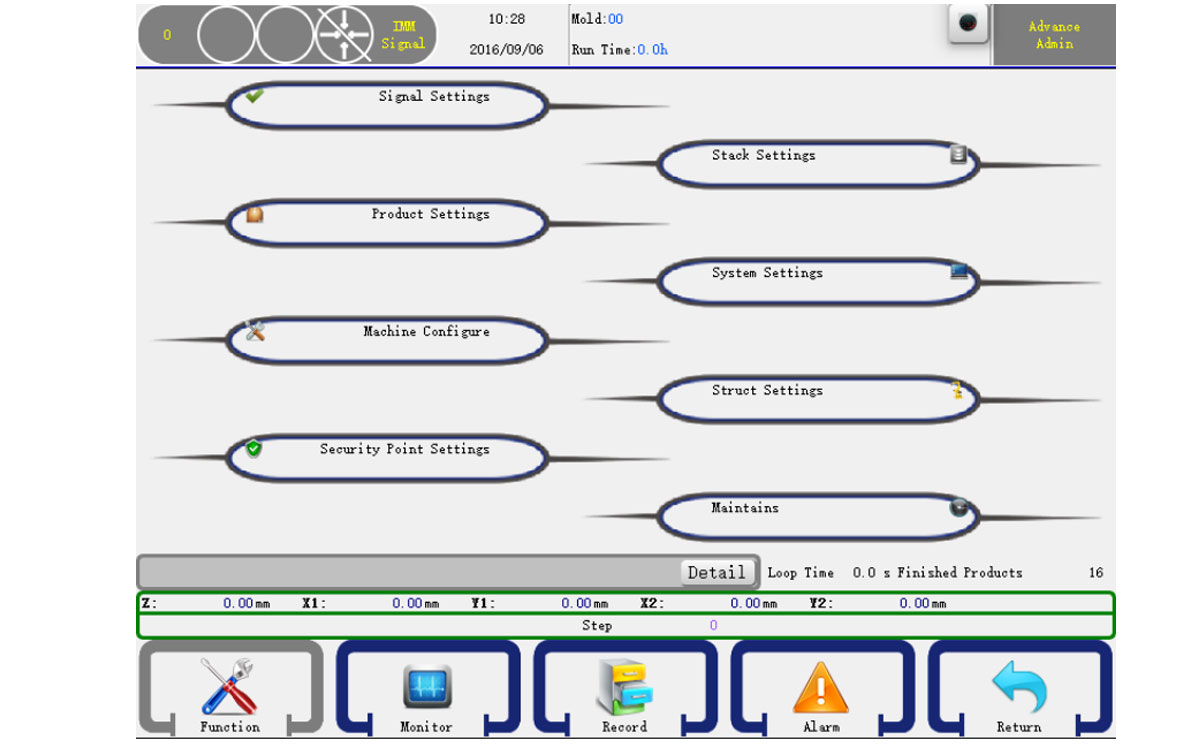
Vous pouvez sélectionner un groupe de fonctions sur cette page. Cliquer sur l'élément ouvrira la page des paramètres détaillés correspondants. Les paramètres de structure ne peuvent être définis que par l'administrateur avancé.
7.1 Paramètres du signal
Cliquez sur l'élément Paramètres du signal pour accéder à la page de configuration du signal, comme indiqué ci-dessous :

- Détecter les appareils 1 à 4 :
Positif : Vérifiez si le signal d'entrée de l'appareil est activé.
Inversé : Vérifiez si le signal d'entrée de l'appareil est désactivé. - Sous-luminaire
Positif : Vérifiez si le signal d'entrée du luminaire est activé.
Inversé : Vérifiez si le signal d'entrée du luminaire est désactivé. - Détecter la position :
Horizontal : La posture doit être horizontale lors de l'exécution d'une action transversale.
Vertical : La posture doit être verticale lors de l'exécution d'une action transversale.
Aucune limite : Aucune limite : Aucune détection. - Détecter l'origine : Horizontal : Le bras du robot doit être en position horizontale lors de l'exécution d'une action de déplacement. Vertical : Le bras du robot doit être en position verticale lors de l'exécution d'une action de déplacement. Aucune limite : Aucune limite : Aucune détection.
- Position U/D :
Horizontale : Le bras du robot doit être en position horizontale lors de l'exécution d'une action de déplacement.
Verticale : Le bras du robot doit être en position verticale lors de l'exécution d'une action de déplacement.
Sans limite : Aucune limite : Aucune détection. - Hor Standby :
Limit Lock Mold : La fermeture du moule est activée uniquement après le passage du bras robotisé en position de veille.
No Limit Lock Mold : La fermeture du moule est activée dès que le bras robotisé commence à se déplacer vers le haut. - Fermer le moule :
Utilisation : Le robot entre dans le moule pour la prise de pièces uniquement après le signal d'ouverture du moule, émis après le signal de fermeture du moule. Dans le cas contraire, une alarme de verrouillage du moule est déclenchée.
Non-utilisation : Le robot ne détecte pas le signal de fermeture du moule, mais entre dans le moule pour la prise de pièces dès réception du signal d'ouverture du moule. - Détecter la porte de sécurité :
Utilisation : Déclenche une alarme lorsque la porte de sécurité est ouverte lorsque le robot est en fonctionnement automatique, quelle que soit l'action.
Non-utilisation : Déclenche une alarme lorsque la porte de sécurité est ouverte lors de l'exécution de l'action de bras baissé. - Détecter la pression : Utilisation : Le robot vérifie la pression de l'air comprimé. Si elle est inférieure à la valeur standard, une alarme se déclenche. Inutile : Ne pas vérifier la pression.
- Détecter le milieu du moule
Utilisation : Le robot vérifie le signal du milieu du moule. En l'absence de signal lorsque le bras du robot est abaissé dans le moule, une alarme est déclenchée.
Inutile : Ne pas vérifier le signal du milieu du moule. - Verrouillage de la liaison d'éjection : Utilisation : Le signal d'activation de l'éjecteur est désactivé une fois l'ouverture du moule terminée et le signal « Activation de l'éjecteur » doit être inséré dans le programme. Inutile : Le signal d'activation de l'éjecteur est normalement activé.
- Exécution automatique
Utilisation : Le robot vérifie le signal Auto de la presse à injecter. S'il n'est pas détecté en mode Auto, une alarme se déclenche. Inutilisation : Le robot ne vérifie pas le signal Auto de la presse à injecter.
7.2 Paramètres du produit
Cliquez sur le bouton Paramètres du produit pour accéder à la page de configuration du produit, comme indiqué ci-dessous :
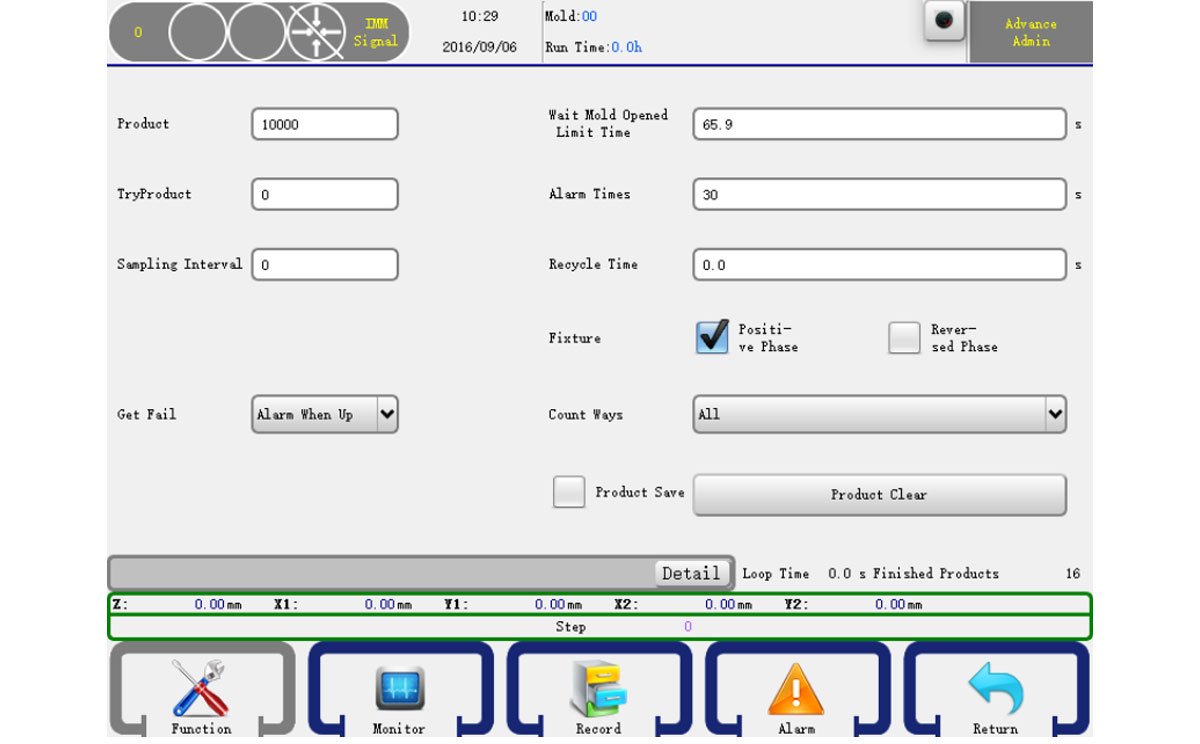
- Produit :Réglage du nombre de produits, lorsque le nombre défini est dépassé, une alarme se déclenche.
- Production d'essai : Le nombre de produits destinés à la production d'essai.
- Intervalle d'échantillonnage : L'intervalle selon lequel un échantillon serait prélevé pour un contrôle de qualité.
- Obtenir un échec :
Alarme d'armement : Activation et alarme lorsque le signal d'échec est vérifié.
Alarme : Alarme immédiate après l'échec de la préparation des pièces. - Temps d'attente limité pour l'ouverture du moule : Le temps d'attente du signal Moule ouvert, le robot émettra une alarme si le temps d'attente est plus long que le réglage.
- Heures d'alarme :Le moment où l'alarme est continue.
- Produit clair :Effacer le nombre de produits finis.
- Temps de recyclage : lorsque la fonction Moule verrouillé est sélectionnée, il s'agit du temps pendant lequel le système a reçu le signal de Moule fermé au signal de Moule activé désactivé.
7.3 Configuration de la machine
Cliquez sur le bouton Configurer la machine pour accéder à la page de configuration de la machine, comme indiqué ci-dessous :
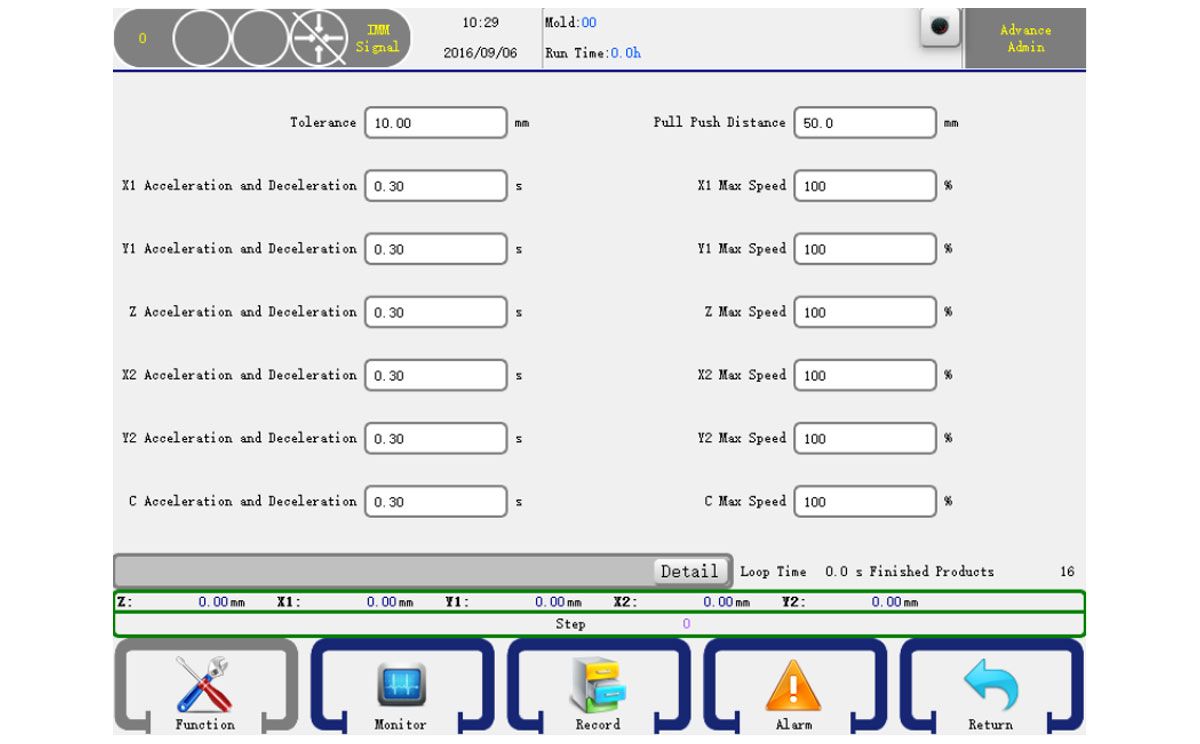
Tolérance : Tolérance entre l'impulsion envoyée et l'impulsion de retour du servo. Zone de sécurité : Zone de sécurité entre les bras et les sous-bras. Accélération et décélération X, Y, Z : Temps d'accélération et de décélération de l'axe du servo. Vitesse maximale X, Y, Z : Vitesse maximale de l'axe du servo.
7.4 Paramètres des points de sécurité
Cliquez sur le bouton Paramètres du point de sécurité pour accéder à la page des paramètres du point de sécurité, comme indiqué ci-dessous :
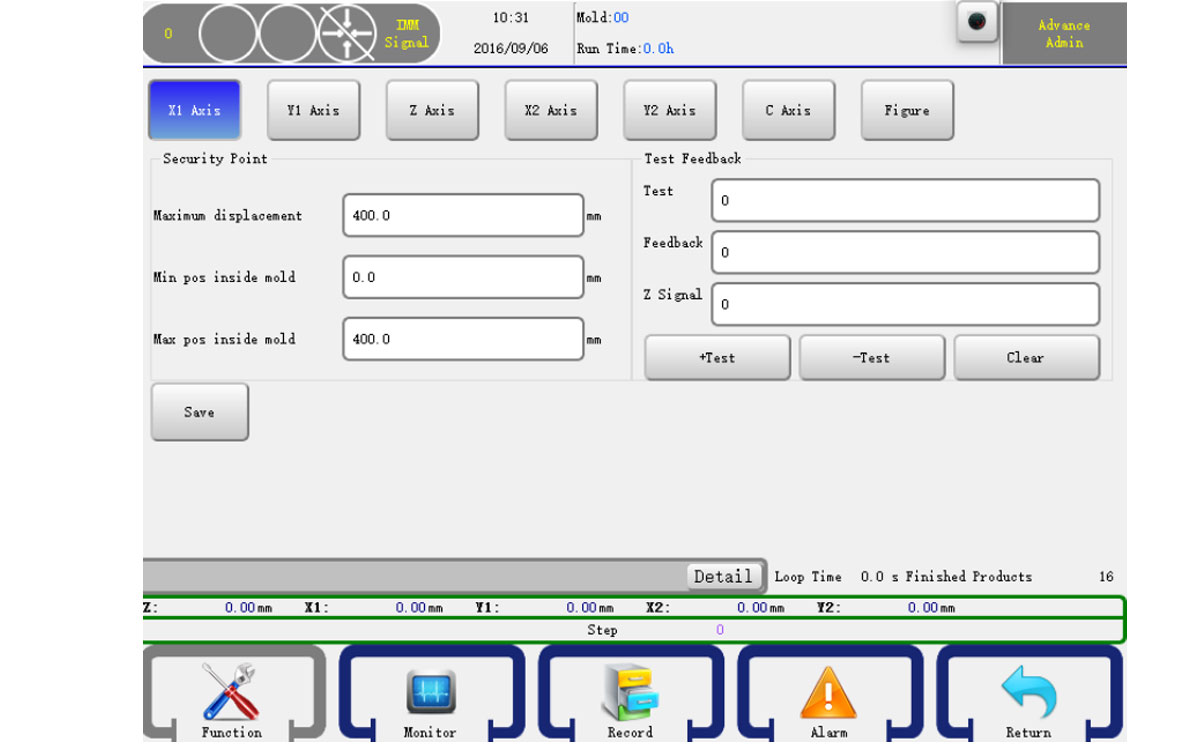
- Appuyez sur l'élément de menu X en haut pour sélectionner l'axe souhaité. Max : Déplacement maximal de l'axe. Maximum intérieur : Position maximale de déplacement de l'axe dans la machine. Minimum intérieur : Position minimale de déplacement de l'axe dans la machine. Test + : Test de l'impulsion positive du servo. Test - : Test de l'impulsion de réserve du servo. Effacer : Efface les données de test. Une fois terminé, cliquez sur le bouton « Set i » pour confirmer.
- Appuyez sur l'élément de menu Y1 en haut pour sélectionner l'axe souhaité. Veille maximale : Définit la position de veille des points maximums de l'axe Y1. Distance de retour à l'origine : Position de Y1 avant l'opération OPR. Appuyez sur l'élément de menu Y1 en haut pour sélectionner l'axe souhaité.
- Appuyez sur l'option Z du menu supérieur pour sélectionner l'axe souhaité. Zone de sécurité intérieure : Définition d'une valeur pour la zone de sécurité à l'intérieur de la machine. Zone de sécurité extérieure : Distance de sécurité à l'extérieur de la machine.
- Appuyez sur l'élément de menu C en haut pour sélectionner l'axe souhaité.
Plage de sécurité transversale :Angle de sécurité lors d'un déplacement transversal. - Appuyez sur l'élément de menu Structure en haut. Comme illustré ci-dessous :
Augmentation minimale sur l'axe X : Position minimale de X lors de la montée du bras dans la machine.
Augmentation maximale sur l'axe X : Position maximale de X lors de la montée du bras.
Augmentation minimale hors de l'axe Y : Position minimale de Y lors de la montée du bras hors de la machine.
Augmentation maximale hors de l'axe Y : Position maximale de Y lors de la montée du bras.
Attention : Vous pouvez modifier la position minimale et maximale de l'axe X dans le champ paramètre de l'axe X de la page des paramètres mécaniques.
7.5 Paramètres de la pile
Cliquez sur l'élément Paramètres de la pile pour accéder à la page des paramètres de la pile, comme indiqué ci-dessous :
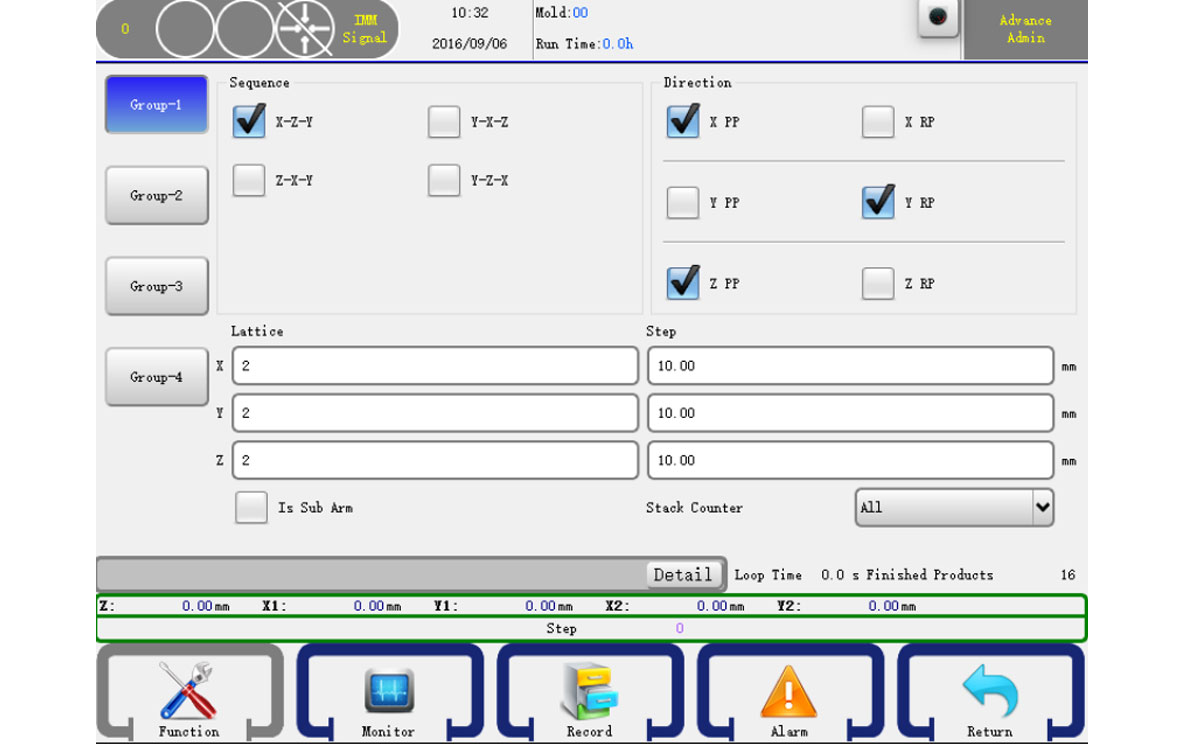
Notre système propose quatre groupes de paramètres d'empilement.
Séquence : Sélectionnez l'ordre d'empilement.
X RP : Si cette option est cochée, le robot empilera en sens inverse sur l'axe X.
Y RP : Si cette option est cochée, le robot empilera en sens inverse sur l'axe Y.
Z RP : Si cette option est cochée, le robot empilera en sens inverse sur l'axe Z.
7.6 Paramètres système
7.6.1 Réglage
Cliquez sur l'élément Paramètres système pour accéder à la page des paramètres système, comme indiqué ci-dessous :
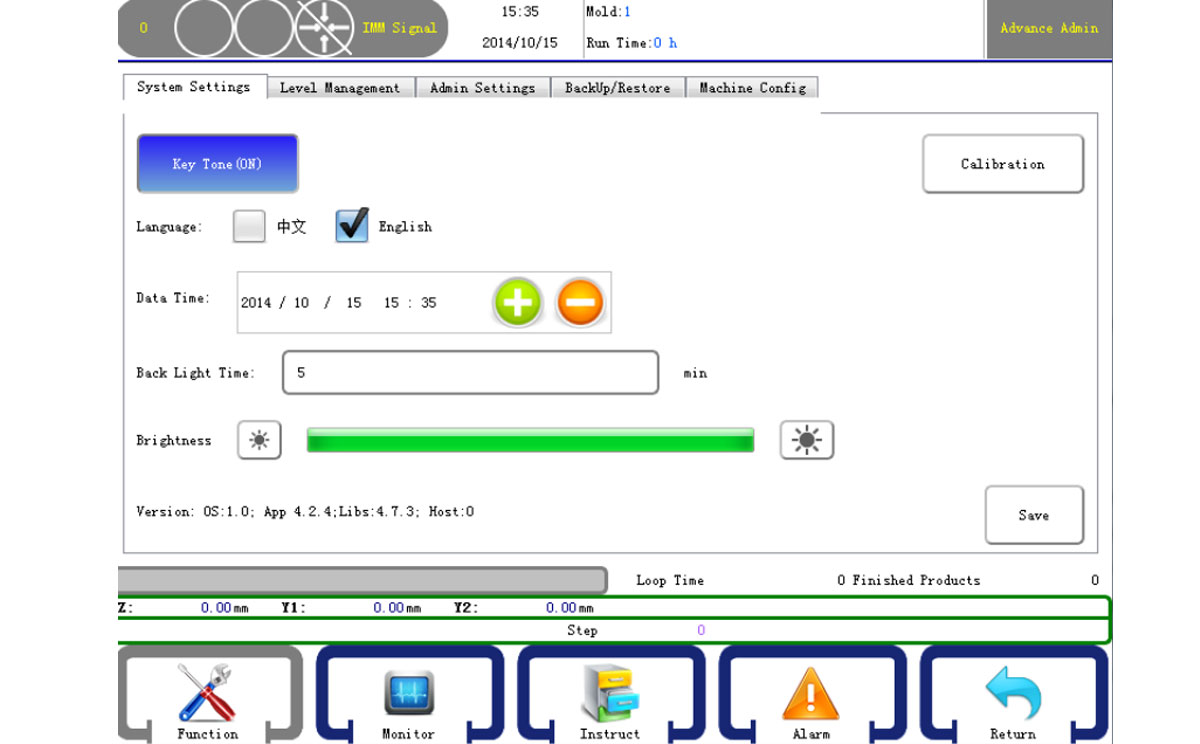
Tonalité des touches : Lorsque vous appuyez sur ces touches, le clavier émet un bip si activé.
Langue : Sélectionnez la langue de l'interface.
Date et heure : Réglez la date et l'heure actuelles.
Durée du rétroéclairage : Si vous ne réglez pas l'heure, le rétroéclairage s'éteindra.
Version : La version du système.
Cliquez sur Enregistrer pour confirmer une fois les paramètres système définis.
7.6.2 Gestion des niveaux
Cliquez sur l'élément Gestion des niveaux pour accéder à la page des paramètres système, comme indiqué ci-dessous :
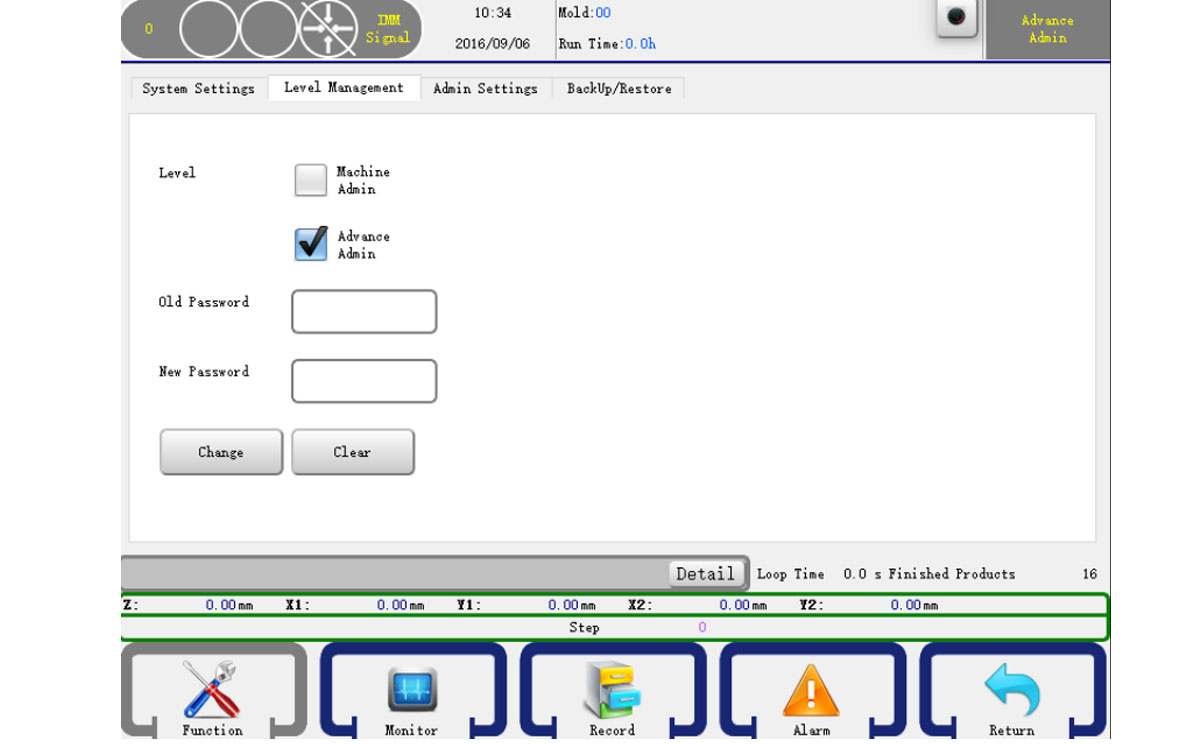
La gestion des niveaux permet de modifier les informations de base, tandis que l'administrateur peut modifier les paramètres. Saisissez l'ancien mot de passe, puis le nouveau et confirmez pour pouvoir le modifier.
7.6.3 Sauvegarde/Restauration
Cliquez sur l'élément Sauvegarde/Restauration pour accéder à la page des paramètres système, comme indiqué ci-dessous :
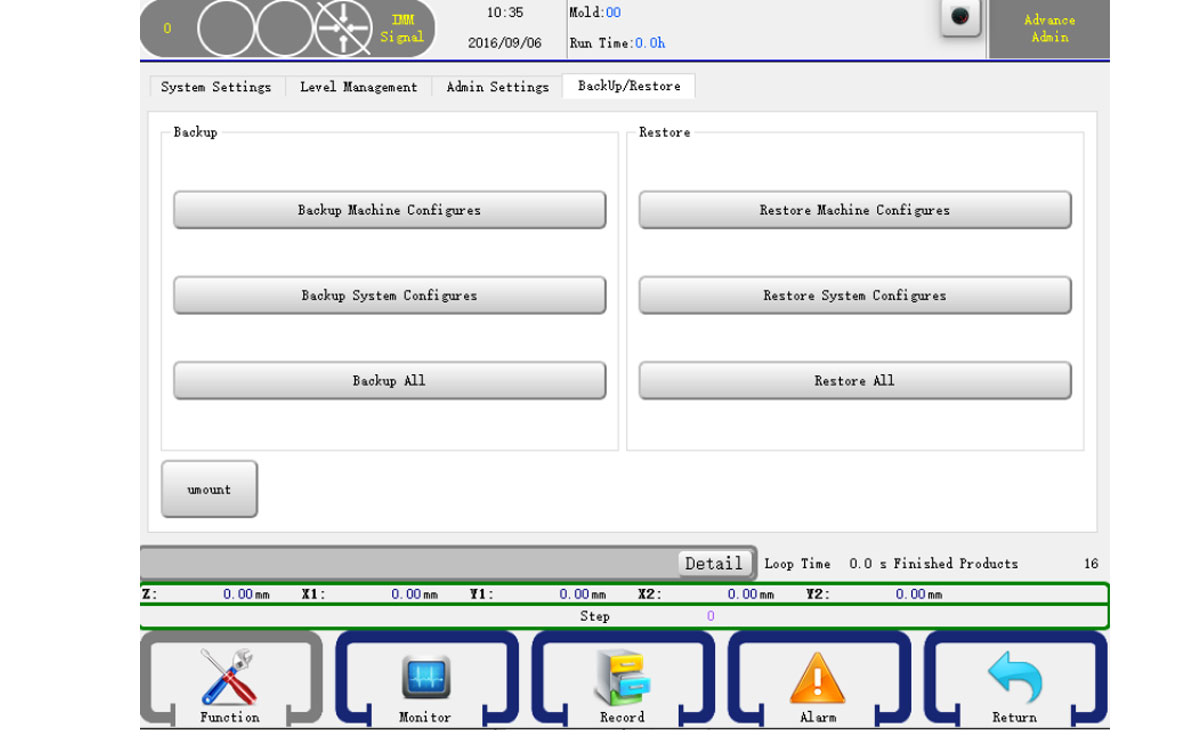
Vous pouvez utiliser la clé USB pour sauvegarder ou restaurer les « Paramètres de la machine », les « Paramètres système » et les « Paramètres du moule » ou sélectionner tous les éléments à sauvegarder/restaurer.
7.7 Paramètres de structure
Cliquez sur l'élément Paramètres de structure pour accéder à la page des paramètres de structure, comme indiqué ci-dessous :
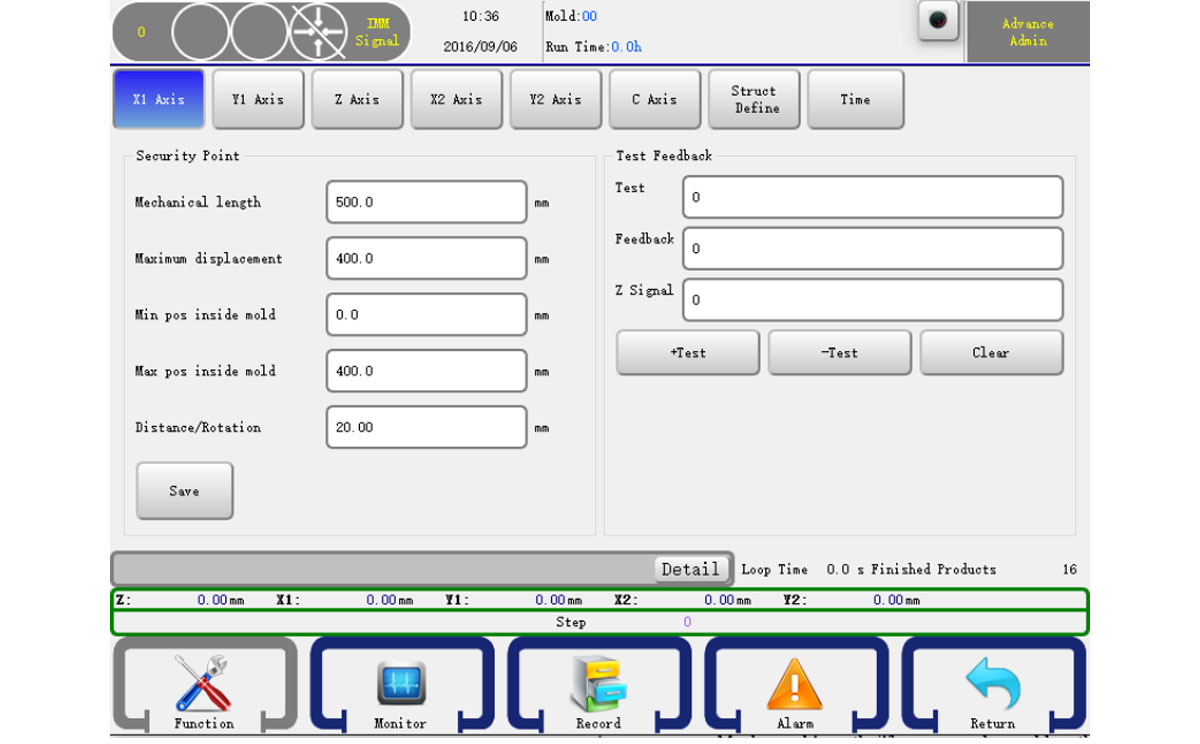
Longueur mécanique : Longueur mécanique de l'axe. Distance/Rotation : Distance d'une rotation du servomoteur. Vous pouvez également définir d'autres paramètres comme indiqué dans la section 5.4. Veuillez appuyer sur le bouton Enregistrer pour confirmer vos modifications. AVERTISSEMENT : La définition de la structure peut endommager la machine et entraîner des blessures ! Veuillez contacter le fabricant.
7.8 Maintient
Cliquez sur l'élément Maintenance pour accéder à la page de maintenance, comme indiqué ci-dessous :
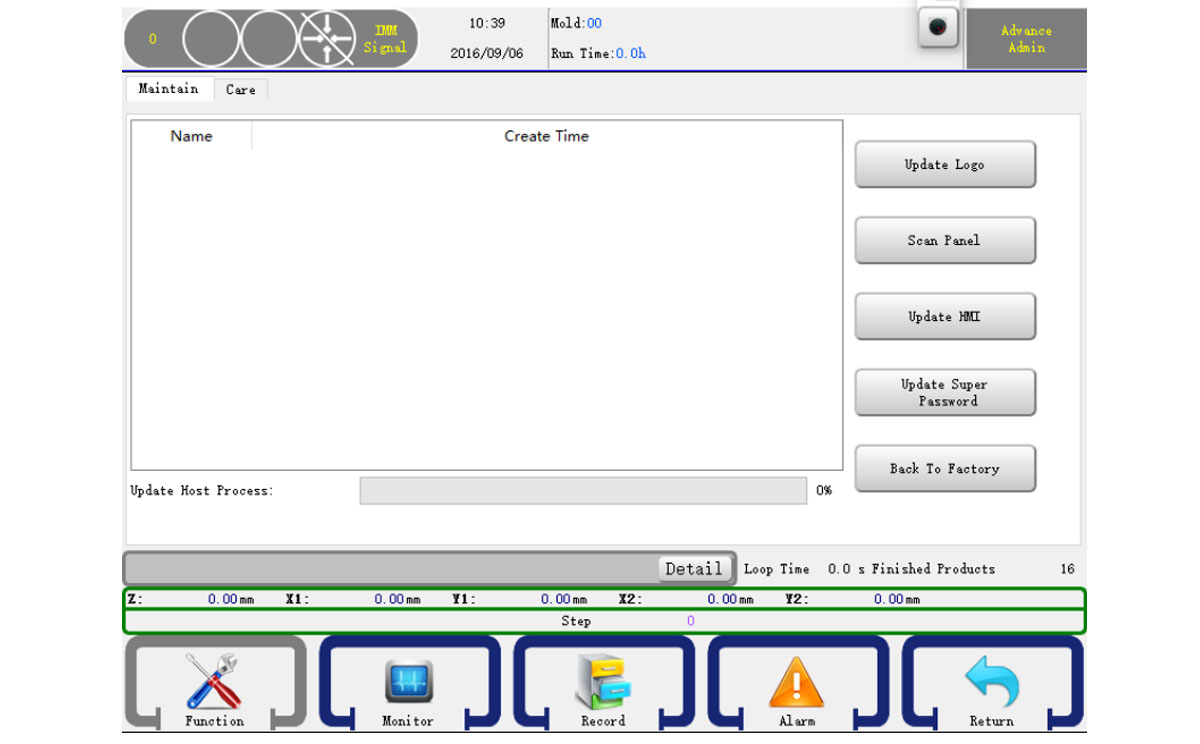
Vous pouvez mettre à jour le panneau de configuration via une clé USB. Insérez le paquet de mise à jour système sur une clé USB. Cliquez sur le bouton « Actualiser » et patientez quelques instants. La page affichera la version du système si la clé USB est vérifiée. Si ce n'est pas le cas, appuyez à nouveau sur le bouton « Actualiser » ou utilisez une autre clé USB. Si la clé USB est vérifiée, cliquez simplement sur le bouton « Mettre à jour » pour lancer la mise à jour. Un message s'affichera ensuite, le système redémarrera et vous pourrez débrancher votre clé USB.







