
Instructions d'installation des bras robotisés SWITEK pour machines de moulage par injection – Chapitre 5 : Fonctionnement
Abstrait
Les bras robotisés pour presses à injecter sont trois modes de fonctionnement : manuel, arrêt et automatique. L'opérateur peut choisir ces trois modes grâce au commutateur situé en haut à gauche de la commande manuelle. Ce chapitre explique comment utiliser et programmer le bras robotisé pour les tests, la programmation, le paramétrage et son fonctionnement automatique.
5.1 Position d'origine renvoyée
Pour que le robot puisse fonctionner automatiquement après la mise sous tension d'un retour à la position d'origine (ORI), il est nécessaire de ramener le robot à sa position initiale pour chaque axe, et de refermer la ventouse et le dispositif de fixation.
En mode arrêt, appuyez une fois sur le bouton « Accueil », puis sur le bouton « Démarrer » pour revenir à la position initiale avec chaque axe Y1(Y2), X1(X2) et Z, dans l'ordre. Simultanément, une fenêtre s'affiche pour vous rappeler que l'opération OPR est en cours et que tous les axes électriques sont à leur position d'origine, à savoir 0.
Lorsque tous les axes, la ventouse et le dispositif reviennent à leur position initiale, une icône apparaît en haut à droite de l'écran.  , vous pouvez utiliser les modes automatique et manuel.
, vous pouvez utiliser les modes automatique et manuel.
Vous ne pouvez pas utiliser les modes manuel et automatique ni modifier les paramètres lors de l'OPR. Veuillez appuyer sur le bouton d'arrêt ou sur le bouton d'arrêt d'urgence en cas d'urgence pour arrêter l'OPR.
5.2 Fonctionnement manuel
Tournez le bouton vers la gauche, le robot passera en statut manuel. Comme indiqué ci-dessous :
5.2.1 Action de l'axe
Les utilisateurs ne peuvent pas déplacer les bras avant l'origine définie, mais peuvent actionner les vannes pneumatiques.
 | Commande pneumatique : Bras principal levé avec une pression unique Commande électrique : Bras principal relevé en appuyant. Le mouvement s'arrête lorsque vous appuyez et relâchez. |
 | Commande pneumatique :Bras principal abaissé en appuyant une fois. Commande électrique : Bras principal abaissé en appuyant. Le mouvement s'arrête lorsque vous appuyez et relâchez. |
 | Commande pneumatique :Bras étau relevé en appuyant une fois. Commande électrique : Bras de l'étau enfoncé. Le mouvement s'arrête lorsque l'on relâche l'appui. |
 | Commande pneumatique :Appuyez une fois sur le bras du vice pour le baisser. Commande électrique : Bras de l'étau abaissé en appuyant. Le mouvement s'arrête lorsque l'on appuie et relâche. |
 | Commande pneumatique :Bras principal vers l'arrière avec une pression unique. Commande électrique : Bras principal en arrière, appuyé. Le mouvement s'arrête lorsque l'appui est relâché. |
 | Commande pneumatique :Bras principal en avant avec une pression unique. Commande électrique : Bras principal en avant avec pression. Le mouvement s'arrête lorsque la pression est relâchée. |
 | Commande pneumatique :Sous-bras vers l'arrière en appuyant une fois. Commande électrique : Bras inférieur arrière enfoncé. Le mouvement s'arrête lorsque vous appuyez et relâchez la pression. |
 | Commande pneumatique :Sous-bras vers l'avant en appuyant une fois. Commande électrique : Bras auxiliaire en avant avec pression. Le mouvement s'arrête lorsque la pression est relâchée. |
 | Contrôle pneumatique :La posture est tournée en position verticale en appuyant une fois. Contrôle électrique : la position se rapproche de la verticale lorsqu'on appuie sur le bouton. Le mouvement s'arrête lorsqu'on relâche le bouton. |
 | Contrôle pneumatique :La posture du bras robotique tourné en position horizontale avec une pression unique. Contrôle électrique : Le bras robotisé se positionne horizontalement lorsqu'on appuie dessus. Le mouvement s'arrête lorsque l'on relâche la pression. |
 | Traverser dans |
 | Traverser vers l'extérieur |
5.2.2 Action du luminaire
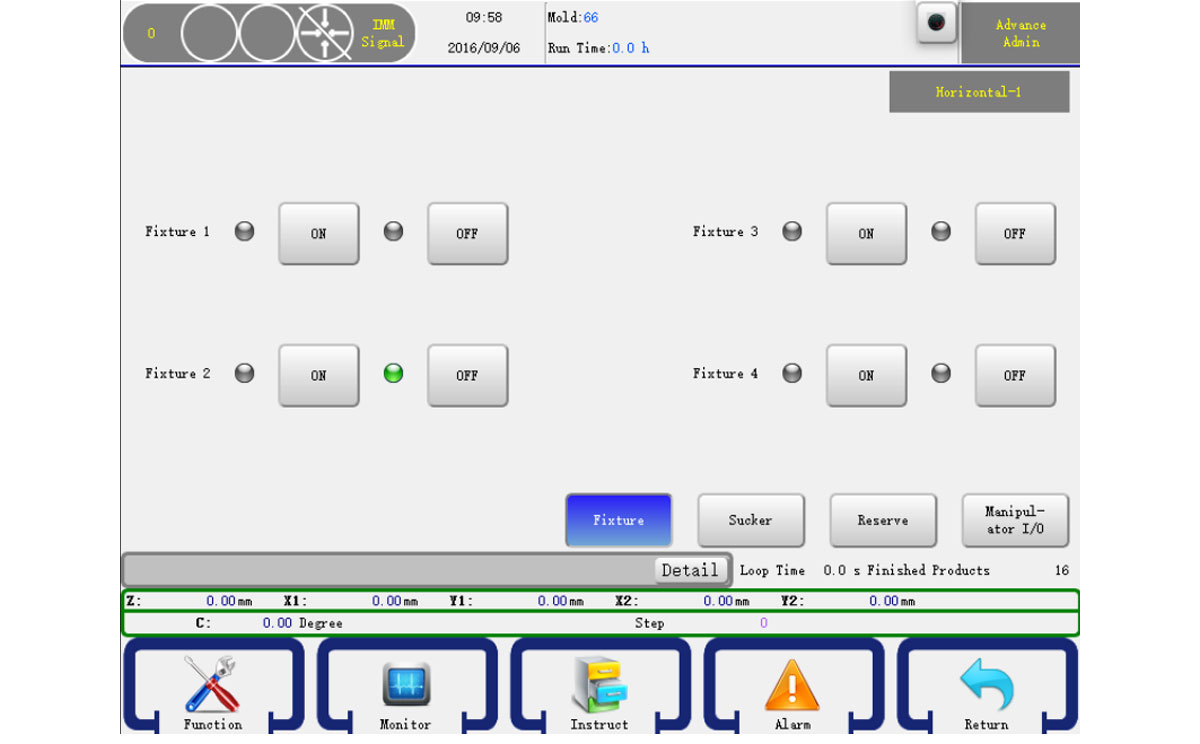
Dans la page du manuel, cliquez sur le bouton Fixture en bas à droite pour accéder à la page du manuel, comme indiqué ci-dessous :
Il y a quatre luminaires. Appuyez sur le bouton ON pour allumer et sur le bouton OFF pour éteindre. Attention : Le signal d'entrée est rouge et le signal de sortie est vert. En l'absence de signal, le voyant d'entrée ou de sortie est éteint.
5.2.3 Action de la ventouse
Dans la page du manuel, cliquez sur le bouton Sucker [Sucker] en bas à droite pour accéder à la page du manuel, comme indiqué ci-dessous :
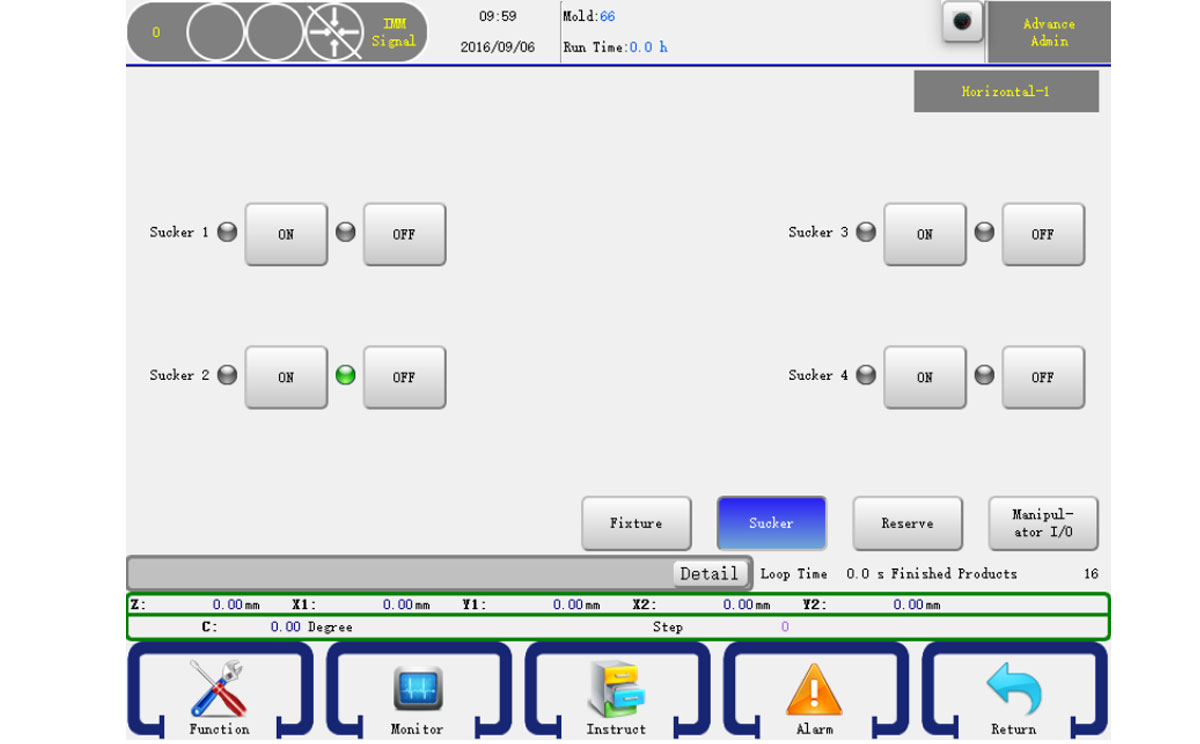
Il y a quatre ventouses. Appuyez sur le bouton ON pour l'allumer et sur le bouton OFF pour l'éteindre.
Attention : Le signal d'entrée est rouge et le signal de sortie est vert. En l'absence de signal, le voyant d'entrée ou de sortie est éteint.
5.2.4 Action auxiliaire
Dans la page du manuel, cliquez sur le bouton Autre en bas à droite pour accéder à l'autre page du manuel comme indiqué ci-dessous :
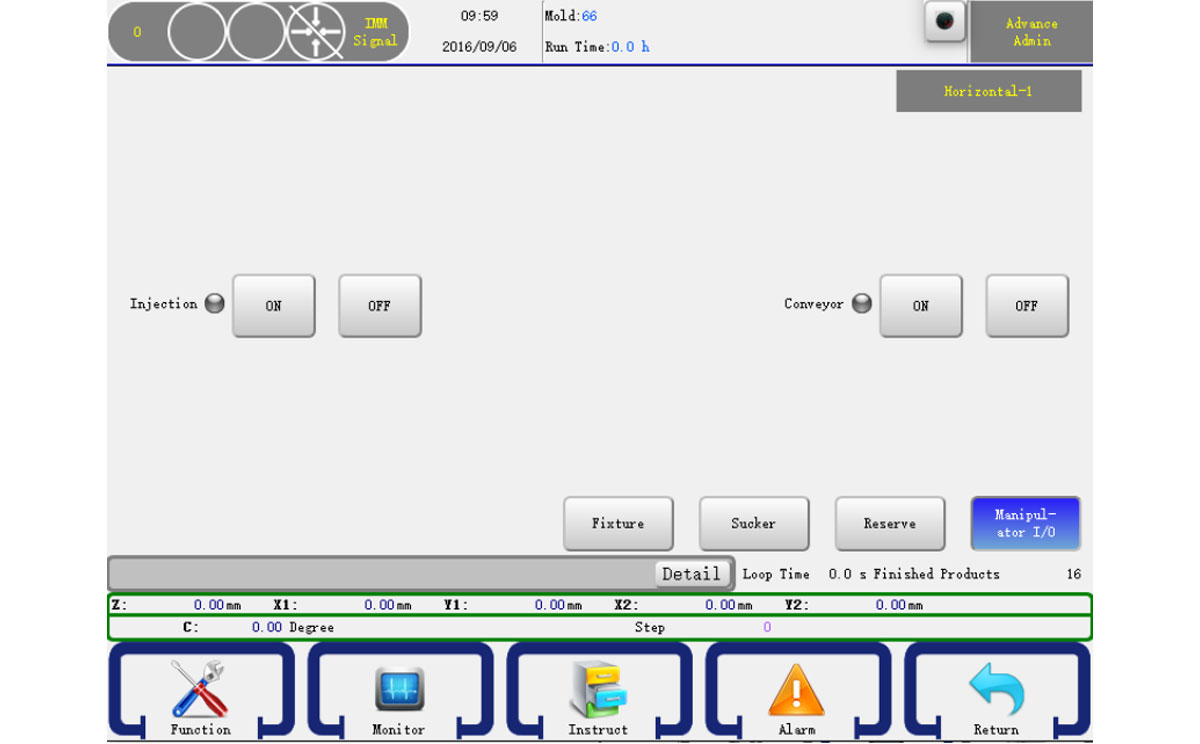
Le fonctionnement est le même que celui de Fixture
5.2.5 Action de réserve
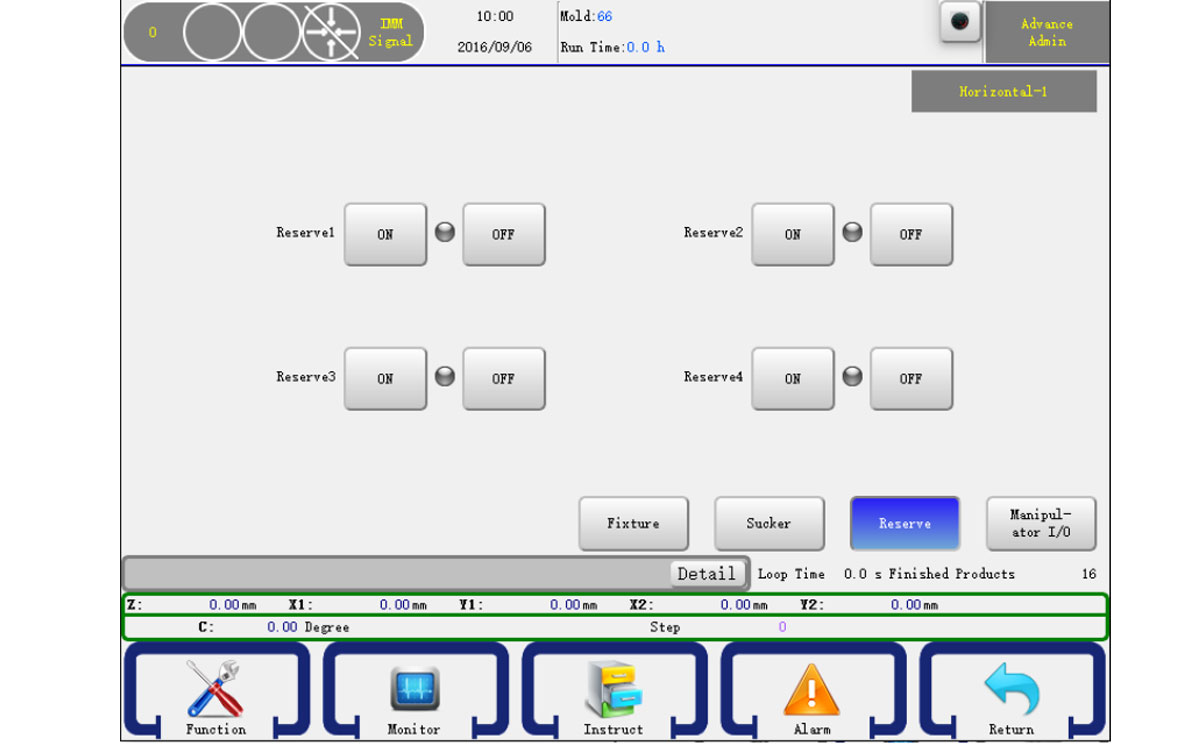
Le fonctionnement est le même que celui de Fixture
5.3 Mode automatique
5.3.1 Surveiller l'état d'exécution automatique
Tournez le bouton vers la droite pour accéder à la page de fonctionnement automatique. Le robot passera alors en mode Prêt automatique. Dans ce cas, appuyez sur le bouton de démarrage pour passer en mode Exécution automatique. Vous pouvez surveiller le fonctionnement, comme illustré ci-dessous.
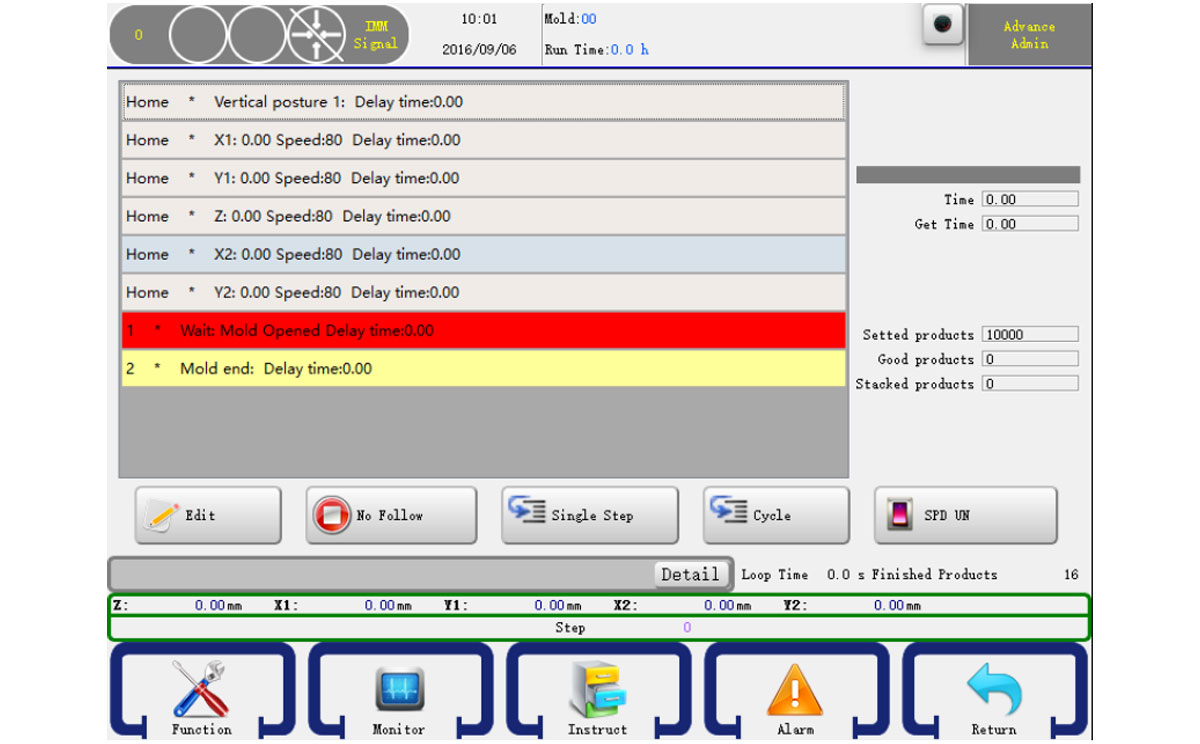
- Période : Temps de suspension dans le cycle d'exécution automatique.
- Temps d'extraction : Le temps que le robot met à récupérer et à retirer le produit dans l'Auto.
- Produits définis : quantité de produits par lot. Une alarme se déclenche lorsque le compteur de produits est atteint.
- Qualifié : Le nombre de pièces retirées par le bras robotisé.
- Nombre d'empilement : Le nombre de produits qui ont été empilés par le robot.
- Temps de boucle : Le temps après un cycle d'exécution en mode Auto.
- Nombre de produits finis : Le nombre de produits finis.
5.3.2 Ajuster les configurations en cours d'exécution
En mode d'exécution automatique, vous pouvez modifier les actions des configurations du programme. Sélectionnez une étape, puis cliquez sur le bouton « Modifier ». Une boîte de dialogue s'affiche. Après avoir cliqué sur « OK », les données sont acceptées et le cycle suivant s'exécute selon vos paramètres. Cliquez sur « Annuler » pour annuler l'opération.
Pour garantir que ces réglages n'endommagent pas le robot, la machine ou le moule, une plage de 5 mm est autorisée. Comme indiqué ci-dessous :
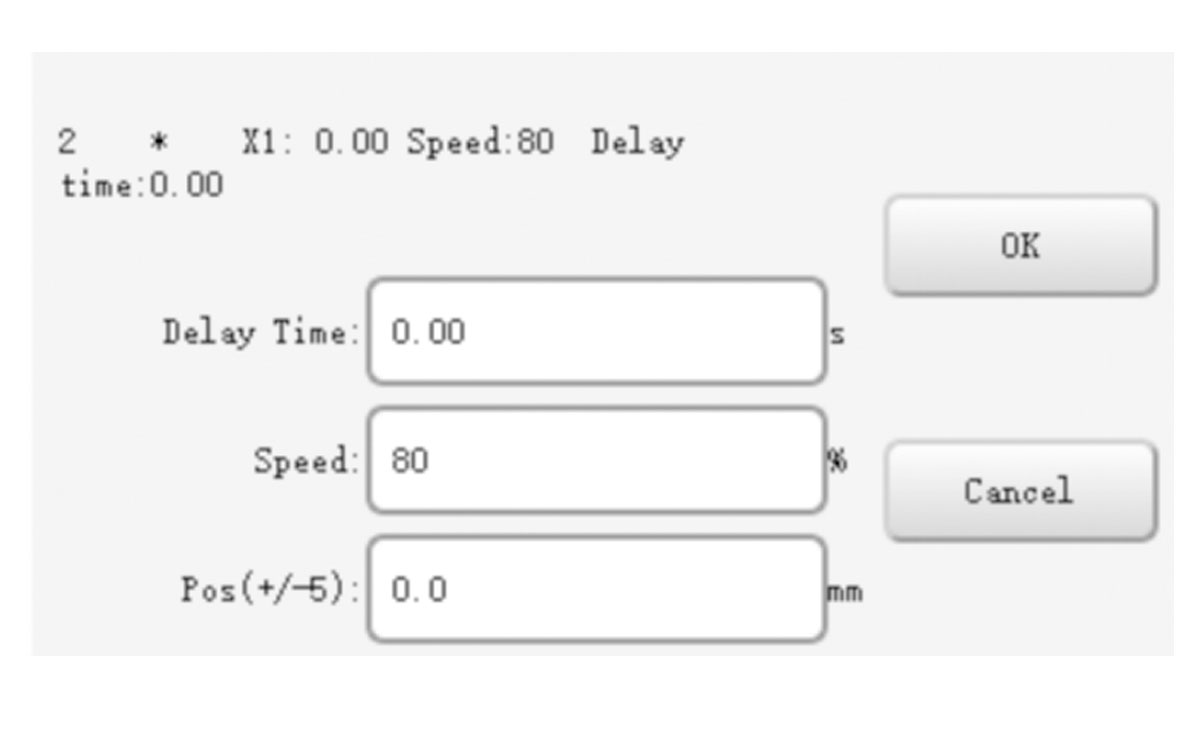
Une fois terminé, cliquez simplement sur le bouton OK pour confirmer votre modification.
5.3.3 Course à un pas
En mode d'exécution automatique, vous pouvez cliquer sur le bouton pour exécuter une étape. Un nouveau clic exécutera l'étape suivante, et ainsi de suite. Cette fonctionnalité est très utile pour déboguer votre programme.
5.3.4 Réglage de la vitesse
Cliquez sur le bouton « Vitesse » pour afficher « Affichage de la vitesse » et régler la vitesse globale en appuyant sur « Réglage de la vitesse » sur le clavier et le panneau en bas à gauche.







